АКТИВНЫЕ РОТОРЫ – неожиданный помощник!
Неожиданный потому, что в Украине об активных роторах и не слышали, а обратили мы внимание на них во время нашей поездки в Италию на Международную с.-х. выставку. Подчёркиваем: здесь речь идёт об активных роторах, а не пассивных, которые широко используются в почвообрабатывающих машинах.
Тест-драйв проведен Техническим центром «Садово-огородная техника».
Неожиданный потому, что в Украине об активных роторах и не слышали, а обратили мы внимание на них во время нашей поездки в Италию на Международную с.-х. выставку. Подчёркиваем: здесь речь идёт об активных роторах, а не пассивных, которые широко используются в почвообрабатывающих машинах (более подробно о пассивных роторах можете почитать в конце этой статьи).
Итальянцы нам сказали, что их используют также для высокой травы и, интенсивно жестикулируя, пытались нам объяснить каким образом. Язык жестов для нас оказался недостаточно понятным, однако мы поняли одно: в этом что-то есть. Поэтому, по возвращении в Украину, решили проверить роторы в деле.
Фото 1. Вот они – активные роторы со спиралевидными ножами. Роторы устанавливаются на рабочие валы редуктора мотоблока вместо фрезы.
Особенность активных роторов – это бочкообразная форма и винтовые планки, которые выполнены в виде ножей, расположенных не к поверхности почвы, как мы привыкли это видеть у обычных роторов, а плашмя. У итальянских фермеров активные роторы – обязательный атрибут набора рабочих органов мотоблока.
Перед тем, как заехать в траву, мы попробовали роторы на чистом от сорняков и растительности участке поля.
Фото 2. Но мы знали, что роторы активные. Поэтому установили сзади сошник (шпору), который используют для работы с фрезой, добавили газ и увидели совершенно другую картину.
Благодаря сошнику, который притормаживал мотоблок, линейная скорость ножей роторов стала выше поступательной скорости мотоблока. Роторы уже не просто перекатывались по полю, они начали рыхлить верхний слой почвы, измельчая до мелкокомковатого состояния. Если на пути попадались листья, стебли или другие растительные остатки, роторы мульчировали их вместе с землёй. И самое главное: роторы срезали бугорки и засыпали канавки. То есть роторы выполняли выравнивание поверхности почвы! Таким образом, активные роторы фактически выполняли функции и ротора, и шлейф-балки, и рыхлящей лапы. Вот в чём прелесть активных роторов. Один рабочий орган, а каков эффект!
Фото 3. Перед вспашкой или безотвальной обработкой почвы необходимо сделать лущение. Активные роторы заменят лущильник и подготовят поле в лучшем виде.
Фото 4. Фрезы с этой задачей не справятся. Через несколько метров прохода они так наматывают на себя траву, что ножи в ней прячутся и не достают до поверхности почвы. В этом уже убедился не один владелец мотоблока.
В этом уже убедился не один владелец мотоблока.
Фото 5. Такая же картина и на правой фрезе.
Фото 6. А вот активные роторы совершенно не забиваются.
Фото 7. Активным роторам под силу травы и сорняки любой высоты.
Фото 8. Мотоблок ГЕПАРД-4 с активными роторами пройдет в таких зарослях «не задумавшись».
Фото 9. Активные роторы можно эффективно использовать для мульчирования почвы растительными остатками и при заделке сидератов (зелёных удобрений).
Фото 10. На запущенных огородах роторы – незаменимая вещь. Включаем 1 или 2 передачу у ГЕПАРДа-4, отпускаем сцепление и роторы тут же начинают рубить сорняки и измельчать их. Придавливаем роторы к земле. Для этого вдавливаем сошник поглубже в землю. Роторы входят в верхний слой почвы и активно перемешивают почву с сорняками. Результат получается такой, которого дисковый лущильник даже за два-три прохода не добьется!
Фото 11. Степень мульчирования можно регулировать оборотами роторов, переходя на повышенную передачу.
Фото 12. Если участок сильно запущенный, обработку его роторами следует проводить дважды, во взаимно перпендикулярных направлениях. После этого участок следует разровнять. Для этого на 2 или 3 передаче быстро пробегаем по неровностям и разглаживаем их.
Фото 13. На этом участке после уборки картофеля была посеяна сидеральная культура – горчица. 31 октября участок был обработан роторами и тут же вспахан. Вот так выглядит участок: слева подготовленная под вспашку почва с изрубленными сидератами, справа – запаханные сидераты.

Итак, подводим итоги. Активные роторы – совершенно необычный рабочий орган, который благодаря своему «активному поведению» выполняет одновременно функции нескольких пассивных рабочих органов, а именно:
- шлейф-балки, выравнивающей поверхность поля;
- культиваторных лап, рыхлящих верхний слой почвы;
- кольчато-рубчатых катков, дробящих комки почвы на более мелкие;
- дисков лущильника, подрезающих и измельчающих стерню и другую растительность;
- фрез, перемешивающих растительные остатки с верхним слоем почвы.
Добавим ещё, что в отличие от фрез, которые могут мульчировать почву с небольшим количеством растительных остатков, роторы спокойно «переваривают» траву любой высоты и в любом количестве. Мы убедились в этом после того, как прокатились по высокой траве роторами и фрезой. Фреза запуталась в траве уже через 20 метров, а роторам всё было нипочём. Эту особенность роторов широко применяют в Западной Европе для заделки сидератов (зелёных удобрений растительного происхождения, легко усвояемых почвой). Перед запахиванием в почву сидераты следует срезать и измельчить. Вот тут и вступают в действие активные роторы. Как оказалось, они идеально подходят для выполнения этой задачи.
Таким образом, активные роторы открывают нам новые возможности использования мотоблока и новые агротехнологии.
Для информации: Проезжая зимой дорогами Западной Европы мы неоднократно обращали внимание на обилие полей, засеянных сидератами. В то же время поля в Украине в этом плане намного беднее, хотя в научной с.-х. литературе говорится об огромной пользе агроприёмов с использованием сидератных культур. И если наши огородники и фермеры предпочитают иметь дело с навозом и минеральными удобрениями, западные фермеры, на наш взгляд, поступают более рационально.
На заметку домашним умельцам: Делать роторы вручную — себе дороже, так как дисбаланс роторов разобьёт редуктор мотоблока. Здесь нужна специальная оснастка. А это выгодно только в том случае, если делать не поштучно, а партиями. Лично мы пробовали изготавливать такие роторы. Ничего из этой затеи сначала у нас не получалось. Сложная геометрическая форма ножей требовала дорогой оснастки, что сразу поднимало цену украинских роторов до итальянских. Пришлось хорошо поломать голову над оснасткой: чтобы была качественной, не сложной и не дорогой. В результате, с 2011 года нам удалось таки наладить производство качественных роторов для мотокультиваторов. В перспективе — изготовление роторов для мотоблоков.
Здесь нужна специальная оснастка. А это выгодно только в том случае, если делать не поштучно, а партиями. Лично мы пробовали изготавливать такие роторы. Ничего из этой затеи сначала у нас не получалось. Сложная геометрическая форма ножей требовала дорогой оснастки, что сразу поднимало цену украинских роторов до итальянских. Пришлось хорошо поломать голову над оснасткой: чтобы была качественной, не сложной и не дорогой. В результате, с 2011 года нам удалось таки наладить производство качественных роторов для мотокультиваторов. В перспективе — изготовление роторов для мотоблоков.
Фото 14. Не ошибитесь! В последнее время в Украине начали делать роторы к мотоблокам (см.фото). Внешне они очень похожи на итальянские активные роторы, но назначение у них все же другое. Их и называют по-другому – ротационными боронами.
На украинском сайте http://www.rosta.ua/ru/rb-18.html
грамотно и кратко изложено их назначение: «При движении мотоблока с секциями ротационной бороны режущие пластины совместно с поперечными дисками измельчают почвенные комки и выравнивают поверхность почвы».
Украинские бороны хорошо разобьют комки почвы, выровняют поверхность огорода, но для заделки сидератов и очистки огорода от сорняков они не предназначены. Поскольку у них другая геометрия планок и другие размеры. А в высокой траве они будут наматывать на себя растительность, о чём нам уже сообщают владельцы таких борон.
Фото 15. Эту конструкцию ротора прислал нам один из читателей нашего сайта. Читатель сообщает, что он работает с такими роторами и у него все получается. Мы приветствуем любую инициативу и искренне рады, что он доволен, но согласитесь: этот ротор всё-таки отличается от роторов, показанных на фото 1 и 2. Если бы по эффективности они были одинаковы, итальянцы не преминули бы упростить конструкцию и тем самым существенно снизить её себестоимость.
Для информации: Фактически украинские роторы для мотоблоков – это давно известные цилиндрические катки, которые вместо гладкой цилиндрической поверхности имеют прутья или планки. Как рабочий орган они входят в состав многих почвообрабатывающих машин для мелкокомковатой разделки почвы и широко применяются в сельском хозяйстве (здесь речь идёт о большой, тракторной технике). Например, роторы имеют знакомые нам ещё с советских времён борона БП-8 и культиватор УСМК-5,4, а в последние годы немецкий культиватор LEMKEN, австрийские груббер VOGEJ&NOOT и комбинированный агрегат SEPAK-profi.
Как рабочий орган они входят в состав многих почвообрабатывающих машин для мелкокомковатой разделки почвы и широко применяются в сельском хозяйстве (здесь речь идёт о большой, тракторной технике). Например, роторы имеют знакомые нам ещё с советских времён борона БП-8 и культиватор УСМК-5,4, а в последние годы немецкий культиватор LEMKEN, австрийские груббер VOGEJ&NOOT и комбинированный агрегат SEPAK-profi.
Фото 16. Большое распространение в Украине получили немецкий агрегат ЕВРОПАК и австрийский СЕПАК-профи (на фото). ЕВРОПАК уже копируют, правда, не совсем удачно, 5 украинских заводов. Эти машины предназначены для поверхностной обработки почвы. Ширина захвата их — 6 м, агрегатируются трактором мощностью порядка 200…250 л.с. и прекрасно готовят верхний слой почвы (5-7 см) под посев. Их задача обеспечить мелкокомковатую (5-15 мм) почву, в которой семена дадут наиболее дружные всходы. И не последнюю роль здесь играют роторы. Эти машины делают сразу несколько операций:
- сглаживание шлейфом поверхности почвы;
- разравнивание роторами поверхности поля;
- рыхление лапами верхнего посевного слоя почвы;
- измельчение роторами почвы до мелкокомковатого состояния;
- выравнивание поверхности почвы пружинными боронками.
Фото 17. ЕВРОГРУББЕР (Австрия) — типичный представитель культиваторов для глубокого рыхления — также имеет пассивные роторы.
Фото 18. Культиватор с пассивным ротором в работе (лущение стерни). Активные роторы выполнят эту же работу без рыхлящих лап.
Мотоблок ГЕПАРД-4 (модель BL-120) активными роторами подготавливает сидераты к запашке.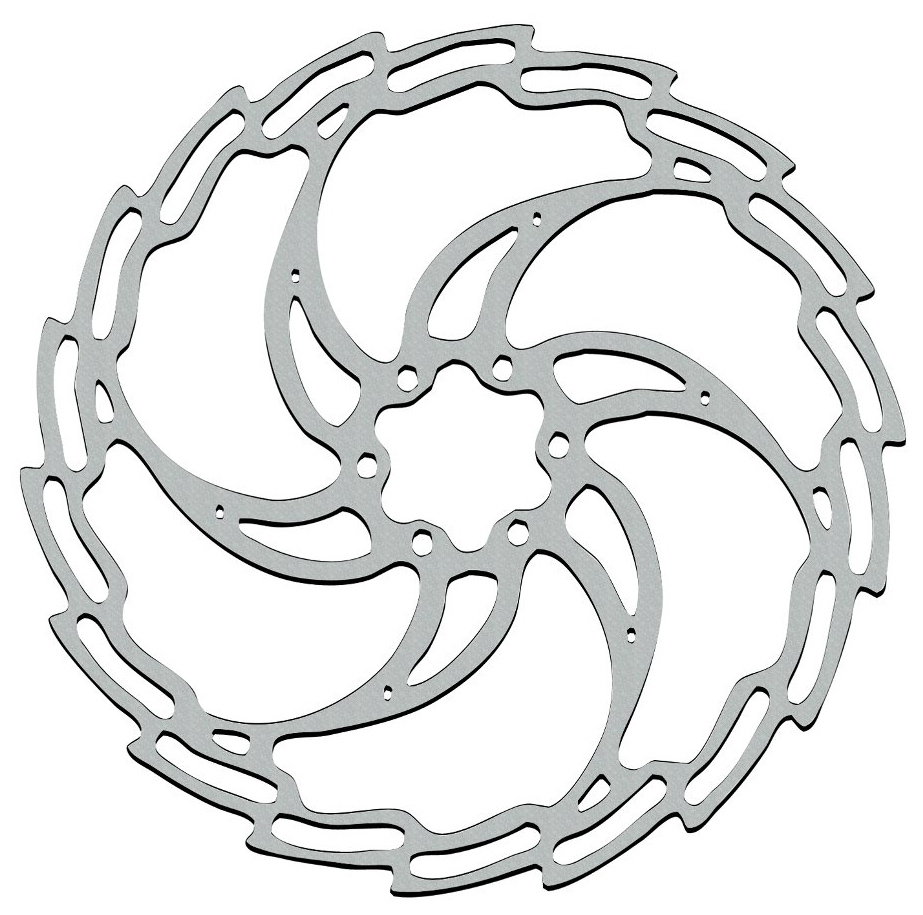 Включена 1-я передача.
Включена 1-я передача.
Мотоблок ГЕПАРД-4 (модель BL-120) активными роторами подготавливает сидераты к запашке. Включена 2-я передача. Активность роторов увеличена.
На 3-ей передаче мотоблок ГЕПАРД-4 (модель BL-120) активными роторами мульчирует сидераты с почвой, что позволит эффективно запахать сидераты.
Если вам достался такой запущенный участок, тут уж без активных роторов не обойтись.
Наши товары, которые описываются в этой статье:
В магазин
Киев, Частное предприятие Технический центр «Садово-огородная техника»
2009-2011 гг.
Активные роторы видео испытаний. С ножами фрезами.
Активные роторы видео испытаний. С ножами фрезами.Активные роторы видео испытаний. С ножами фрезами.
На фазенде моего друга есть один участок земли, на который я был очень зол … И, объяснение этому — немудрено … Сильно запущенный и заросший травой, с 10 — сантиметровым слоем корней / дерна — он не поддавался обработке никаким механизированным земледельческим мото / инструментом … Ручной инструмент — ломался, как спички и тратить, на его обработку, немереное количество часов и сил — не было никакого желания …
Поэтому — было принято единственное, из возможных вариантов — решение : попробовать использовать для его обработки активные бороны … В первой части размышлений, на тему изготовления этого типа сельско / хозяйственного оборудования для обработки земли, были рассмотрены различные побочные аспекты, которые впоследствии помогли при практическом изготовлении самодельных активных роторов своими руками . ..
..
Активные роторы не смогли бы получиться такими, какими они стали в конечном счете, так как при их изготовлении, начиная от расчетов и заканчивая воплощением в металле — как, говорится, полезные мысли возникали по ходу пьесы … В итоге получилась конструкция с 25-ю заточенными ножами (!!!) на каждом активном роторе и у сорняков — просто не осталось никаких шансов …
Самодельные активные роторы — 25 ножей на фрезе …
Для изготовления был выбран материал / сталь 4 мм и, на первый взгляд — конструкция казалась прочной … Однако, после монтажа активных роторов на деревянном полу стойбища мотоблоков и выезде задним ходом на поляну (чтобы не тупить ножи) — главные режущие полукруглые фрезы оказались сплющены под весом мотоблока старой советской конструкции, который / формально — можно сравнить с трактором Кировец … Хотя, фрезы — и можно легко поправить молотком (на мягкой земле этот эффект проявляется значительно меньше) — все-таки, для такого монстра, наиболее подходящий материал 6мм (а, то — и все 8 мм) …
Идея заточить все режущие поверхности пришла во время заточки основных ножей / фрез … Хотя, многие самодельщики указывали, что использовали активные фрезы вообще без заточки ножей — все-таки тупые поверхности гораздо хуже заточенных … Зачем катиться плоскостью по земле вхолостую, если есть возможность кромсать все и вся — любой, наезжающей на землю (траву и дерн), поверхностью ? В ответ активные роторы дадут более мягкое движение с минимальной амплитудой неизбежного подпрыгивания … Несмотря на то, что ножи фрез заточены не под идеальный нож, а всего лишь приблизительно (насколько это возможно при ручной заточке) — заточенные грани активных роторов играют и блестят на солнце … На рисунке, острые режущие грани ножей — отмечены красным цветом, чтобы их можно было легко посчитать …
Активные роторы — выделены заточенные режушие поверхности …
Самодельные активные роторы выполнены по классической пяти / угольной схеме, с большими окнами для выпадения / вываливания земли и травы, так как ориентированы для использования на целине / тяжелой почве, с большим количеством сорняковой растительности (в том числе — и высокого роста) . .. Хотя, в будущем — есть вариант рассмотреть активный ротор с шестью ножами / фрезами для более плавного и мягкого хода мотоблока (и лучшего измельчения земли) …
.. Хотя, в будущем — есть вариант рассмотреть активный ротор с шестью ножами / фрезами для более плавного и мягкого хода мотоблока (и лучшего измельчения земли) …
Испытания проводились после проливных дождей, накрывших Россию от Иркутска до Челябинска (и остановившихся, видимо — уперевшись в Уральский горный хребет) — поэтому трава и корни все-таки наматывались на ножи, как пластилином скрепленные влажной землей … Я думаю, что на сухой почве — этот эффект будет менее заметен … Также — не получилось провести испытание на высокой траве (из-за времени осеменения ее пришлось преждевременно скосить) — но это не помешало пройтись по оставленным дорожкам с сеном, которые были легко перелопачены мотоблоком с активными роторами …
Иногда — мотоблок идет, как комбайн, иногда — как междугородний Икарус по автостраде … Управляемость — легкая (вернее движение достаточно прямолинейное), однако — и небольшие подпрыгивания имеют место быть — это положительные последствия фазированной / зеркальной установки активных роторов относительно друг / друга … Активные роторы тянут мотоблок настолько хорошо, что иногда его приходится осаживать, плотно налегая на центральный нож сзади, глубже вгоняя его в землю для торможения …
Теперь, когда обговорены основные моменты работы активных роторов — самое время посмотреть видео в действии :
— видео : по целине / земле, заросшей сорняками, с развитой многолетней корневой системой …
Активные роторы, видео испытаний, часть 1 …
Активные роторы, видео испытаний, часть 2 … По целинной земле, поверх скошенных и высохших сорняков / сена … Хотел сделать по стоячим сорнякам, но не успел, пришлось скосить, чтобы не осеменились …
Активные роторы, видео испытаний, часть 3 … Вид сзади мотоблока, при управлении одной рукой, сложновато / но можно, хотя камера и прыгает (да еще солнце бликует на экране, не позволяя точно поймать объект съемки) … Как, говориться : лучше один раз увидеть, чем 10 раз услышать . ..
..
Хвалю ли я работу активных роторов в тяжелых условиях эксплуатации ? … Несмотря на все обнаруженные просчеты и недочеты — да … Потому-что любое другое орудие обработки целинной земли — напрочь забивается корнями через метр / два после начала работы … Активные роторы позволяют не беспокоится об этом, в крайнем случае дать задний ход на пару метров … После 150 метров можно слегка почистить особо закрученные стебли / корни растений сорняков — и можно ехать дальше … Скорость обработки / возделывания тяжелой земли возрастает, даже не в десятки — в сотни раз …
Думаете, я бы затеял их изготовление, даже не предполагая, сколько людей примет участие в их изготовлении ? … Конечно — нет … Проще — купить, но к сожалению в нашем регионе — активные роторы не признаны, и — не продаются … Конечно — можно было заказать через интернет, но в этом случае роторы не были бы такими, как представлялись в уме, с учетом опыта из советских книг 1960 гг. по правильным углам входа орудий в землю и максимально адаптированных по размерам к собственному мотоблоку, осей которых достаточное количество разновидностей …
июль, 2019 …
Как можно улучшить и доработать активные роторы / фрезы ? … Угол, отмеченный на рисунке — должен быть 100 градусов …
Угол режущих поверхностей ножей 100 градусов …
Не могу проверить непосредственно сейчас (я в городе, роторы в деревне) — но, по аналогии со смертельным китайским оружием, отточенным годами — оптимальный угол между лезвиями китайского оружия Гэ (траверсы) должен составлять 100 градусов … Эти сведения подтверждают источники …
Кунг Фу и смертельное оружие …
Гэ (оружие), иногда неправильно переводится, как — алебарда …
май, 2020 …
Популярные теги для сайта.
Самые популярные теги, краткое описание более 1000 страниц менее, чем в 100 ключевых словах … Чтобы найти более подробную информацию, самое простое — использовать поиск по сайту на соответствующие запросу — ключевое слово или фразу . ..
..
Decoder данных … Авто … Бесплатно онлайн … Список ПК программ … Россия … Погода … ЭБУ … Sat … Torrent tracker … Работа двигателя … На трассе и по маршруту … Диагностика … ЦУП … УпрДор … Метео … Гидрометцентр … Москва … Екатеринбург … Смотреть прогноз … Расчет … Калькулятор … Онлайн … Вeacon … Calculator … COVID … ECU … Meritor … Motor … OBD … SDR … Telemetry … Tool … USB … Windows … Радио … Развлекательный сайт … Новости сегодня … Связь … Ремонт … Системы … Сканер … Состояние трассы … Диагностика двигателя … Длина волны … Программы для компьютера …
Популярное : …
… Найти … Как улучшить фото … Делфи на Андроид … Погода М-4, М-5, М-7, Р-22 … Список торрент трекеров … Калькулятор кода радио … Частота в длину волны … RTL SDR Radio …
TechStop-Ekb.ru : познавательные развлечения, техника, технологии … На сайте, для работы и соответствия спецификациям — используются … Протокол HTTPS шифрования для безопасного соединения с сервером и защиты пользовательских данных … Антивирус DrWeb для превентивной защиты пользователей от интернет угроз и вирусов … Ресурс входит в рейтинги Рамблер Топ 100 (познавательно-развлекательные сайты) и Mail Top 100 (авто мото информация) …
Тех Стоп Екб RU (РФ) официальный сайт, популярные темы, погода, новости, обзоры с картинками, бесплатно, актуально, без регистрации … Смотреть утром, днем, вечером и ночью — круглосуточно онлайн …
Меню раздела, новости и новые страницы.
… | … ТехСтоп Екб … | … Главное меню … | … Быстрый поиск … | …
© 2021 Тех Остановка Екатеринбург, создаваемый с 2016++ с вами вместе навсегда бесплатно …
Активные роторы для мотоблоков предназначены для предварительной подготовки запущенных участков почвы, выравнивания её поверхности, заделки органических удобрений. Сами по себе активные роторы представляют собой цилиндрические катки, которые вместо гладкой цилиндрической поверхности имеют ножи в виде прутьев или планок. Ротора катятся по поверхности почвы и своими ножами измельчают её выравнивая поверхность участка. Как отдельный рабочий орган этот агрегат входит в состав многих машин для обработки почвы. |
 Обычно ими обрабатывают участки перед пахотой, которые сильно засорены или раньше не обрабатывались.
Обычно ими обрабатывают участки перед пахотой, которые сильно засорены или раньше не обрабатывались.
Активные магнитные подшипники
Активные магнитные подшипники (АМП) представляют собой устройство поддержания ротора без механического контакта за счет сил магнитного притяжения и использования следящей обратной связи, цепь которой, как правило, содержит датчики, электромагниты, усилители мощности, источники питания и контроллеры.
Комплект магнитных подшипников, производимых «Казанькомпрессормаш» состоит из двух частей:
- механические элементы радиальных, осевых подшипников и вспомогательные (страховочные) подшипники
- шкаф электронной системы управления
Статорные части поставляются в полной укомплектованности, готовые к монтажу в корпус компрессора.
Современная техника и технология системы магнитных подшипников обеспечивает работу подшипниковых узлов с нагрузочной способностью до 105 Н при любых условиях:
- при высоких и низких температурах (от -250°С до +450°С)
- в условиях вакуума, агрессивных коррозионных сред (воздух, гелий, углеводород, пар, гексафторид урана, морская вода, жидкий кислород и водород)
- в условиях высоких частот вращения центробежных компрессоров от 0 до 12 000 об/мин
- при повышенном давлении до 25…50 Bar
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ И ПРЕИМУЩЕСТВА
По сравнению с традиционными механическими опорами (подшипниками качения и подшипниками скольжения) активные магнитные подшипники позволяют решить задачи повышения технической и эксплуатационной эффективности компрессоров:
- Полностью исключить узлы механического трения, тем самым существенно уменьшить энергетические потери мощности оборудования;
- Полностью исключить систему маслоснабжения (насосы, фильтры, устройства подвода смазки, маслоохладители), а также связанные с ними начальные и эксплуатационные затраты;
- Повысить надежность и срок службы (более 100 000 часов) подшипников и на порядок уменьшить поддерживающие затраты во время эксплуатации оборудования;
- Повысить эксплуатационную и экологическую безопасность оборудования за счет исключения паров масла в помещениях, где устанавливается компрессорная установка;
- Исключить загрязнение процессного газа жидкой или консистентной смазкой;
- Полностью решить проблемы динамики роторных систем, связанные с обеспечением допустимых вибраций в опорах как в установившихся, так и в переходных режимах работы компрессорной установки;
- Исключить проблемы центровки подшипниковых узлов в машинах с количеством подшипников более двух на едином роторе;
- Нивелировать проблемы конструкции, связанные с тепловым расширением деталей машины;
- Осуществлять текущий контроль характеристик магнитных опор (вибраций, температур, токов электромагнитов,
осевых сил и других) с помощью встроенных в подшипники устройств без установки дополнительного измерительного оборудования.

«Казанькомпрессормаш» изготавливает и поставляет «сухие» нагнетатели с магнитным подвесом ротора для газоперекачивающих
агрегатов 4, 6.3, 8, 12 и 16 МВт, характеристики которых приведены в таблице
НЦ-4 |
НЦ-6,3 |
НЦ-8 |
НЦ-12 |
НЦ-16 |
5ГЦ2- |
4ГЦ2- |
|
Мощность привода, МВт |
4 |
6,3 |
8 |
12 |
16 |
12 |
8 |
Производительность по |
6,5 |
10,2 |
13 |
18 |
32,4 |
2,0 |
2,3 |
Давление нагнетания, |
5,48 (56) |
7,45 (76) |
7,45 (76) |
5,48 (56) |
7,45 (76) |
6,27 (64) |
7,74 (79) |
Степень сжатия |
1,26; 1,44 |
1,44 |
1,44 |
1,44 |
1,44 |
14,2 |
5,64 |
Номинальная частота |
8200 |
8200 |
8200 |
6500 |
5300 |
8900 |
8200 |
КПД политропный |
0,85 |
0,85 |
0,85 |
0,85 |
0,85 |
0,75 |
0,75 |
Масса, кг |
10000 |
12000 |
14000 |
15000 |
17000 |
16000 |
14250 |
Габариты, мм |
2100 |
1560 |
1560 |
2000 |
2200 |
2700 |
2840 |
Полный ресурс |
100 000 |
100 000 |
100 000 |
100 000 |
100 000 |
100 000 |
100 000 |
Специалисты «НИИтурбокомпрессор им.![]() В.Б. Шнеппа» осуществляют работы по проектированию, сопровождению изготовления,
пусконаладке, вводе в эксплуатацию и сервису систем АМП центробежных компрессоров, включая:
В.Б. Шнеппа» осуществляют работы по проектированию, сопровождению изготовления,
пусконаладке, вводе в эксплуатацию и сервису систем АМП центробежных компрессоров, включая:
- Проработка структуры и состава комплекта АМП согласно индивидуальным требованиям заказчика
- Расчеты радиальных и осевых электромагнитов, оптимизированных по конструктивным и электрическим характеристикам
- Проработка конструкций роторных систем, оптимизированных по вибродинамике в рабочих и переходных режимах работы роторных машин
- Проектирование шкафов управления АМП
- Синтез оптимальных настроек АМП существующих и новых проектов
- Размещение и сопровождение работ по изготовлению составных частей АМП, включая электромеханические конструктивные узлы и электронную аппаратуру управления
- Сервисное обслуживание АМП на объектах эксплуатации
- Консультации по теоретическим и практическим вопросам построения АМП
Роторы на постоянных магнитах, магнитные роторы
Компания ВЭЛМА производит роторы на основе постоянных высокоэнергетических магнитов на заказ, учитывая специфические особенности конкретных задач и дополнительные требования Заказчиков.
Специалистами компании ВЭЛМА разработаны технологии производства высокоскоростных роторов электрических машин. Основные отличия магнитных роторов нашего производства — формирование магнитных систем заданной Заказчиком топологии на базе РЗМ магнитов и изготовление бандажей из различных материалов — никелевых, титановых сплавов и армированных композитов.
Ротор на постоянных магнитах не имеет обмотки возбуждения, полюса ротора задаются направлением намагниченности постоянных магнитов.
Роторы на основе постоянных магнитов и магнитопластов обладают рядом преимуществ по сравнению с аналогичными изделиями:
- благодаря использованию постоянных магнитов разрабатываемые и производимые изделия обладают высокими эксплуатационными свойствами;
- возможность функционирования в самых жестких условиях эксплуатации: при повышенной температуре, в химически агрессивной среде и даже в вакууме;
- применение роторов на основе постоянных магнитов позволяет упростить конструкцию двигателей и снизить производимый ими шум;
- использование роторов на постоянных магнитах позволяет снизить энергопотребление и обеспечить высокие показатели по коэффициенту полезного действия.

Контроль намагниченности магнитной системы ротора при намагничивании ротора в сборе
Компания ВЭЛМА занимается как серийным выпуском магнитных роторов, так и совместной разработкой изделий, исходя из индивидуальных потребностей Заказчика. Роторы проходят поверку на специально разработанных стендах с контролем намагниченности магнитной системы ротора.
Консультация по услугам
Персональный менеджер подробно ответит на ваши вопросы и подготовит индивидуальное коммерческое предложение.Задать вопрос
Исследования и разработки
Направления деятельности:
- Разработка и исследование методов совершенствования турбин, турбинного оборудования и двигателей внутреннего сгорания
- Разработка и исследование методов совершенствования турбин, турбинного оборудования и двигателей внутреннего сгорания
В институте проводятся комплексные исследования и работы, направленные на совершенствование турбин, турбинного оборудования и двигателей внутреннего сгорания (ДВС). Основные направления:
- повышение маневренности паровых турбин и динамической надежности турбоагрегатов, повышение экономичности и надежности ГТУ и ГПА;
- совершенствование теплообменного оборудования турбоустановок;
- совершенствование технологии изготовления и монтажа паровых турбин;
- разработка новых информационных технологий для проектирования и эксплуатации оборудования ТЭС;
- разработка автоматизированных обучающих систем по эксплуатации турбоустановок;
- совершенствование двигателей внутреннего сгорания и их систем.
По всем направлениям проводятся сквозные разработки от теоретических моделей и стендовых исследований до реального внедрения результатов на турбинных заводах, предприятиях, производящих турбинное оборудование и двигатели внутреннего сгорания, на тепловых и атомных электрических станциях, а также на компрессорных станциях магистральных газопроводов.
Проведено совершенствование электрогидравлической системы регулирования и защиты паровых теплофикационных турбин и их элементов. Разработана и внедрена в производство серийная электрогидравлическая система регулирования и защиты паровых теплофикационных турбин, с характеристиками точности и нечувствительности, соответствующими современному мировому уровню.
Разработаны и внедрены в практику работы турбостроительного завода уточнённые методики расчёта параметров системы регулирования и защиты паровой турбины и её элементов. По сравнению с известными отечественными системами регулирования и защиты повышен уровень контроля безопасности работы турбин путём автоматического полного поканального испытания системы защиты на работающей турбине без её останова.
Результаты реализованы на более чем 50 паровых турбинах, используются при проектировании новых паровых теплофикационных турбин ЗАО «Уральский турбинный завод» и в проектах реконструкции паровых турбин ЗАО «Уральский турбинный завод» и ОАО «Уралэнергоремонт».
Разработаны методы повышения вибрационной надежности турбомашин на магнитном подвесе. На основе результатов экспериментальных исследований нагнетателей природного газа на компрессорных станциях предприятия «Газпром трансгаз Томск» и численного моделирования вынужденных колебаний системы «ротор – активные магнитные подшипники (АМП)» разработаны методы повышения вибрационной надежности турбомашин на магнитном подвесе. На основе анализа и численного моделирования вынужденных колебаний системы «ротор – подшипники – опоры» с учетом ее упруго-массовых и демпфирующих свойств для агрегатов ГТН -16, широко используемых на компрессорных станциях газотранспортных систем Газпрома, предложены конструктивные мероприятия для повышения вибрационной надежности турбоагрегатов. Показано, что отстроить систему от резонансов на рабочей частоте вращения возможно изменением геометрических и конструктивных параметров подшипников.
Разработаны новые конструкции пароструйных эжекторов, работающих в составе новых парогазовых установок, позволяющие учитывать особенности различных схем и условий включения эжекторов в технологические подсистемы энергоблоков. Новизна предлагаемых решений заключается в заложенной в конструкции эжекторов возможности изменять их геометрические параметры для получения оптимальных рабочих характеристик для конкретных ПТУ. Практическая полезность разработки заключается в возможности проводить наладку работы эжекторов в условия энергопредприятий в процессе приемосдаточных испытаний. Потребителям разработки являются тепловые электростанции, энергокомпании. Новая конструкция эжектора определяется следующими научно-техническими решениями: выносные охладители, возможность изменять осевое расстояние между соплом и камерой смешения.
Синхронные двигатели малой мощности (микродвигатели)
В чем основное отличие синхронных двигателей малой мощности (микродвигателей) от асинхронных моторов?
- Их ротор является магнитом или электромагнитом малой мощности, а у маломощных агрегатов он не имеет обмотки возбуждения и щеток.
- Токовая фаза может заметно опережать фазу напряжения.
- Частота вращения постоянна и не зависит от нагрузки.
В целом на ротор из твердых магнитных материалов однократно воздействуют сильным импульсным полем, намагничивая его. Намагниченность полюсов сохраняется надолго. Если магнит изготовлен из мягкого материала, ротору придается соответствующая форма для того, чтобы магнитопровод обладал разным радиальным магнитным сопротивлением. Двигатели с постоянным магнитом имеют цилиндрический ротор из твердого магнитного материала. Их стартовая обмотка коротко замкнута.
Принципы работы синхронных двигателей малой мощности (микродвигателей)
При запуске такой двигатель действует по принципу асинхронного, возбуждаясь от поля постоянных магнитов в крутящемся роторе. Из-за этого в обмотке статора возникает эдс с непостоянной частотой. Она создает токи, вызывающие тормозящий момент. Достигнув скорости синхронизма, двигатель перестает быть в асинхронном состоянии, после чего входит в свой обычный режим синхронизма с соответствующей скоростью. Такие синхронные двигатели малой мощности (микродвигатели) используются в фототехнике, бытовых устройствах, часовых механизмах, в автоматике и т.д.
Она создает токи, вызывающие тормозящий момент. Достигнув скорости синхронизма, двигатель перестает быть в асинхронном состоянии, после чего входит в свой обычный режим синхронизма с соответствующей скоростью. Такие синхронные двигатели малой мощности (микродвигатели) используются в фототехнике, бытовых устройствах, часовых механизмах, в автоматике и т.д.
Синхронный реактивный мотор
Он оснащен равнополюсным ротором. Имеет стартовую обмотку и изготавливается из особой листовой стали. Короткозамкнутой обмоткой является заливка алюминиевым или другим диамагнетиком.
Мощность этих моторов обычно не превышает 100Вт, в целом, она в 2-3 раза ниже мощности двигателей с неизменными магнитами (хотя они проще в исполнении и дешевле). КПД от 0,35 до 0,4, а максимальный мощностной коэффициент – 0,5.
Реверсивные синхронные двигатели
Четыре катушки на обеих частях расщепленных полюсов заменяют у них короткозамкнутые витки. Закоротив одну из пар, достигают вращения вала в нужную сторону.
Синхронные гистерезисные моторы
Их роторы изготовлены из магнитотвердого сплава с широкой гистерезисной петлей, и их намагничивает вращающееся магнитное поле статора. Они могут действовать как синхронным, так и асинхронным способом.
Для них характерны:
- очень высокий пусковой момент;
- токовая конфигурация порядка 20-30% при переходе с холостого хода в режим КЗ;
- плавный вход в режим синхронизма.
Двигатели этого типа выгодно отличаются от реактивных простотой конструкции, надежностью и маломощностью в работе, а также небольшим размерам и весом. Их выпускают и на 50 герц, и на другие частоты. Обладая мощностью не более 400Вт, они бывают одно- и двухскоростными.
Реактивно-гистерезисные двигатели
Их статор явнополюсного типа находится внутри обмоточного каркаса. Продольный паз разрезает два полюса на магнитопроводе на одинаковые части. Редуктор соединяет выходной вал с ротором и уменьшает скорость вала до нескольких сот или десятков оборотов в минуту.
Шаговые моторы
Они превращают электронные импульсы управления в угол поворота, реализуемый дискретным способом. На магнитопроводе статора находятся 2 или 3 однообразные обмотки. Они сдвинуты в пространстве и поочередно подключаются к источнику прямоугольных импульсов. Ротор явнополюсного типа может быть как активным, так и реактивным. У активных роторов есть обмотка возбуждения и контактные щетки или неизменные магниты, чья полярность чередуется. Реактивным роторам все вышеизложенное не свойственно.
Колеблющееся коллективное движение активных роторов в ограниченном пространстве
Активное вещество привлекло значительный интерес в последние два десятилетия из-за его внутренней неравновесной природы и потенциальных применений в микроустройствах и интеллектуальных материалах (1–6). В системах активной материи составляющие частицы индивидуально преобразуют накопленную или окружающую энергию в подвижность частиц: самоходное поступательное движение (7⇓ – 9) или вращение (10⇓⇓⇓⇓ – 15). В активном веществе часто наблюдаются экзотические неравновесные явления, среди которых особенно интригует возникающее коллективное поведение активных частиц (16⇓⇓⇓⇓⇓ – 22).
Благодаря подвижности активных частиц роль изначально тривиальных ингредиентов в пассивных системах становится чрезвычайно тонкой и важной в активных системах. Соответствующим примером является то, что ограничивающая стенка в активной системе не только предотвращает вылет частиц и создает поверхностное натяжение, как в случаях равновесия, но также вызывает коллективное движение активных частиц, которое в противном случае отсутствует. Например, сперматозоиды и микроорганизмы образуют вращающиеся кластеры около субстрата (23–25), коллоидные серферы на субстрате объединяются в живые кристаллы (26), а коллоидные валики и бактерии, ограниченные боковыми стенками, самоорганизуются в вихревые узоры (27). № – 29).В этих ситуациях гидродинамические взаимодействия между границей и активными частицами имеют решающее значение для возникновения коллективного поведения.
В этой статье мы изучаем, как ограничение может влиять на неравновесную коллективную динамику взаимодействующих активных роторов. По сравнению со своими трансляционными аналогами, системы, состоящие из активных роторов, остаются гораздо менее изученными. Тем не менее, как типичное киральное активное вещество, которое нарушает симметрию как четности, так и симметрии обращения времени, системы с активным ротором в последнее время стали предметом фундаментального теоретического интереса (30, 31).Сообщалось, что жидкость взаимодействующих роторов в ограниченном пространстве создает коллективный краевой поток, параллельный границе (12, 32, 33), который, как было доказано, даже топологически защищен (34). В этом случае стерические взаимодействия частицы с границей накладывают граничное условие, которое позволяет преобразовать спин-угловой момент в «орбитальный» угловой момент. Однако, помимо стерических взаимодействий с частицами, ограничение может также вызывать пространственно неоднородное распределение плотности числа частиц (35, 36).Неоднородность плотности встречается повсеместно в замкнутых взаимодействующих системах многих тел и может иметь неожиданные последствия для коллективного поведения. Здесь мы численно и экспериментально исследуем влияние неоднородности плотности на возникающее коллективное поведение в ограниченной киральной активной материи. Мы показываем, что неоднородность плотности может вызвать пространственно-осциллирующий краевой поток, и лежащий в основе его механизм выясняется с помощью континуальной гидродинамической теории с зависящим от плотности антисимметричным напряжением трения.Кроме того, мы выделяем три различных коллективных режима движения и их соответствующие структурные истоки.
Результаты
Система моделирования состоит из N вращающихся дисков диаметром σs, ограниченных круговой границей радиуса R, как показано на рис. 1 A . Каждый составляющий диск вращается против часовой стрелки под действием постоянного крутящего момента, а различные роторы взаимодействуют посредством отталкивающего потенциала с поверхностным трением. Чтобы сфокусировать наше исследование на неоднородности, вызванной ограничением, мы допускаем только радиальное отталкивающее взаимодействие между стенкой и частицами.Динамика частицы описывается уравнением Ланжевена с недостаточным демпфированием. В экспериментах круглый сосуд, содержащий монослой зубчатых гранулированных роторов (рис. 1 B ), установлен на электромагнитном вибраторе, и вращение роторов приводится в движение вертикальной вибрацией. Чтобы сравнить моделирование с экспериментами, мы используем безразмерное число, ωs / Dr, чтобы охарактеризовать подвижность изолированного ротора для обеих систем. Здесь ωs и Dr относятся к скорости вращения и коэффициенту вращательной диффузии изолированного ротора соответственно.Экспериментальное значение ωs / Dr составляет 6,2 ( SI, приложение ), и мы выбираем ωs / Dr = 6,0 при моделировании.
Чтобы сфокусировать наше исследование на неоднородности, вызванной ограничением, мы допускаем только радиальное отталкивающее взаимодействие между стенкой и частицами.Динамика частицы описывается уравнением Ланжевена с недостаточным демпфированием. В экспериментах круглый сосуд, содержащий монослой зубчатых гранулированных роторов (рис. 1 B ), установлен на электромагнитном вибраторе, и вращение роторов приводится в движение вертикальной вибрацией. Чтобы сравнить моделирование с экспериментами, мы используем безразмерное число, ωs / Dr, чтобы охарактеризовать подвижность изолированного ротора для обеих систем. Здесь ωs и Dr относятся к скорости вращения и коэффициенту вращательной диффузии изолированного ротора соответственно.Экспериментальное значение ωs / Dr составляет 6,2 ( SI, приложение ), и мы выбираем ωs / Dr = 6,0 при моделировании.
( A ) Снимок моделирования 1000 вращающихся дисков в ограниченном пространстве с коэффициентом упаковки ρ = 0,6, где На вставке показано увеличенное изображение. ( B ) Экспериментальный снимок шестеренчатых блесен в круглом сосуде с ρ = 0,65. Нижняя вставка — это эскиз (вид сбоку) активного ротора, напечатанного на 3D-принтере, а Верхняя вставка — вид сверху ротора с D1 = 15.50 ± 0,06 мм и D2 = 21,26 ± 0,06 мм.
Колеблющийся краевой поток.
Сначала рассмотрим жидкую систему с плотностью упаковки ρ = 0,6 при моделировании (фильм S1). Следуя предыдущей работе (12, 32), мы измеряем установившуюся среднюю тангенциальную скорость частиц в различных концентрических кольцах vt (параллельно границе), чтобы количественно оценить коллективное движение. Обратите внимание, что средняя радиальная скорость, нормальная к стенке, vr, исчезает из-за удержания. На рис. 2 B показана орбитальная угловая скорость роторной жидкости vt (r) / r как функция расстояния от центра системы, r.На протяжении всей статьи орбитальная угловая скорость нормирована на скорость вращения изолированного ротора ωs. Действительно, вблизи границы существует краевое течение. Интересно, что vt (r) / r немонотонно меняется с расстоянием и демонстрирует значительные колебания в пространстве и даже меняет знак. Период колебаний коллективного движения равен диаметру ротора. Величина колебаний существенно уменьшается с уменьшением r и исчезает вдали от границы, указывая на то, что краевой поток локализован вблизи границы.Предыдущие исследования ограниченных блесен также выявили появление краевого потока, но без колебаний (12, 32, 33).
Действительно, вблизи границы существует краевое течение. Интересно, что vt (r) / r немонотонно меняется с расстоянием и демонстрирует значительные колебания в пространстве и даже меняет знак. Период колебаний коллективного движения равен диаметру ротора. Величина колебаний существенно уменьшается с уменьшением r и исчезает вдали от границы, указывая на то, что краевой поток локализован вблизи границы.Предыдущие исследования ограниченных блесен также выявили появление краевого потока, но без колебаний (12, 32, 33).
( A ) Принципиальная схема микроскопического механизма коллективного движения в ограниченной системе активного ротора. ( B — D ) Орбитальная угловая скорость и распределение плотности частиц (нормированное на среднюю плотность числа частиц) как функция расстояния до центра системы: результаты моделирования с γ = 100 ( B ) , экспериментальные результаты ( C ) и результаты моделирования с γ = 2 ( D ), где синие линии и левая вертикальная ось относятся к угловой скорости, пурпурные линии и правая вертикальная ось относятся к числовой плотности распределения, а пунктирные линии — экспоненциальная аппроксимация пиковых значений орбитальной угловой скорости.
Чтобы понять микроскопический механизм пространственно-осциллирующего краевого потока, отметим, что наличие ограничения нарушает пространственную однородность системы. Таким образом, среда, ощущаемая частицами вблизи границы, значительно отличается от среды вдали от границы. В частности, граничная стенка может вызывать пространственно колеблющееся распределение частиц в пассивных жидкостях, чтобы минимизировать свободную энергию системы (35, 36). Распределение числовой плотности n (r) активных роторов также показано на рис.2 B и демонстрирует поведение, подобное поведению пассивной системы ( SI, приложение ), подразумевая, что структурные свойства хиральной активной системы нечувствительны к спину. Основываясь на пространственной неоднородности и активном вращении, можно легко определить движущую силу для краевого потока.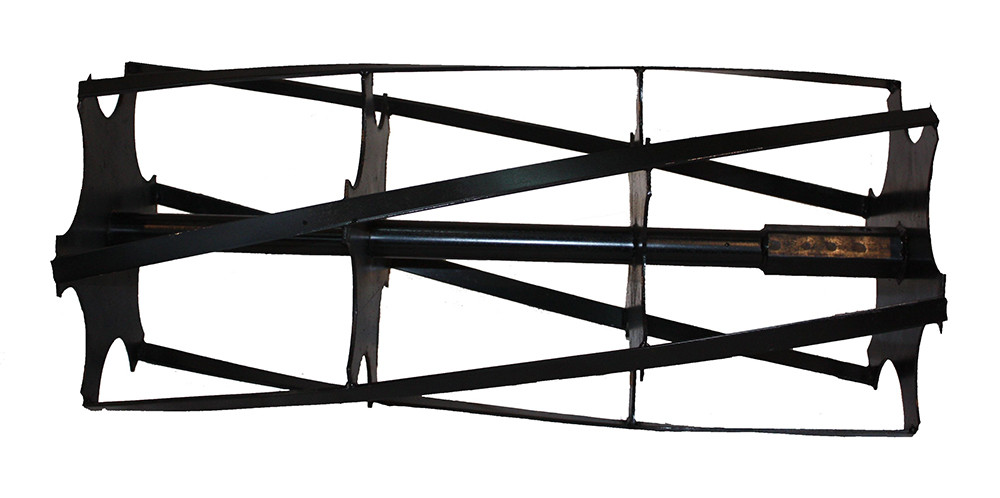 Как показано на фиг. 2 A , частицы в самом внешнем слое, то есть в роторе 1, испытывают касательную силу от ротора 2, F21, создаваемую из-за трения между вращающимися частицами.Поскольку ограничивающая стенка гладкая и не прикладывает тангенциальную силу к ротору 1, F21 заставляет ротор 1 двигаться против часовой стрелки. Тем не менее, для частиц в других слоях, например роторе 2, ротор 1 внешнего слоя и ротор 3 внутреннего слоя создают на него противоположные силы трения F12 и F32. Если числовая плотность внутреннего слоя выше, чем у внешнего слоя, внутренний слой в среднем будет применять большее тангенциальное трение, и, следовательно, ротор 2 будет двигаться против часовой стрелки; в противном случае он будет двигаться по часовой стрелке.Следовательно, колеблющееся распределение числовой плотности, которое имеет равновесное структурное происхождение, может вызвать зависящее от положения (пространственно-колебательное) напряжение трения, которое затем приводит в движение колеблющийся краевой поток в пространстве. Вдали от границы плотность системы, а также напряжение трения имеют тенденцию быть однородными, и, следовательно, макроскопический поток исчезает. Такой сценарий сформулирован с помощью континуальной гидродинамической теории в «Теоретическое описание качающегося краевого потока» .
Как показано на фиг. 2 A , частицы в самом внешнем слое, то есть в роторе 1, испытывают касательную силу от ротора 2, F21, создаваемую из-за трения между вращающимися частицами.Поскольку ограничивающая стенка гладкая и не прикладывает тангенциальную силу к ротору 1, F21 заставляет ротор 1 двигаться против часовой стрелки. Тем не менее, для частиц в других слоях, например роторе 2, ротор 1 внешнего слоя и ротор 3 внутреннего слоя создают на него противоположные силы трения F12 и F32. Если числовая плотность внутреннего слоя выше, чем у внешнего слоя, внутренний слой в среднем будет применять большее тангенциальное трение, и, следовательно, ротор 2 будет двигаться против часовой стрелки; в противном случае он будет двигаться по часовой стрелке.Следовательно, колеблющееся распределение числовой плотности, которое имеет равновесное структурное происхождение, может вызвать зависящее от положения (пространственно-колебательное) напряжение трения, которое затем приводит в движение колеблющийся краевой поток в пространстве. Вдали от границы плотность системы, а также напряжение трения имеют тенденцию быть однородными, и, следовательно, макроскопический поток исчезает. Такой сценарий сформулирован с помощью континуальной гидродинамической теории в «Теоретическое описание качающегося краевого потока» .
Соответствующие экспериментальные результаты представлены на рис. 2 C , на котором показана орбитальная угловая скорость гранулированных прядильных машин (рис. 1 B ) с низкой степенью упаковки ρ = 0,65 (отношение площади, занимаемой частицы к частицам сосуда). Результаты также показывают пространственно колеблющийся краевой поток (Movie S2) с периодом около диаметра прядильщика. Хотя гранулированные прядильщики являются макроскопическими и диссипативными, ограничение все же может привести к пространственно неоднородному распределению плотности, аналогичному моделированию.Следовательно, существенные требования для возникновения осциллирующего коллективного движения (т. е. неоднородность, спин и межчастичное трение) полностью удовлетворяются. Таким образом, экспериментальные результаты убедительно подтверждают наши теоретические предсказания.
е. неоднородность, спин и межчастичное трение) полностью удовлетворяются. Таким образом, экспериментальные результаты убедительно подтверждают наши теоретические предсказания.
Тем не менее, между моделированием и экспериментом существуют два очевидных различия. Одним из них является, что VT (г) / г из моделирования осциллирует вокруг нуля (рис. 2 B ), в то время как в эксперименте, В.Т. (г) / г осциллирует вокруг опорного значения, которое, по существу, с распадах уменьшением г (рис.2 С ). Во-вторых, амплитуда колебаний симуляции vt (r) / r больше, чем у экспериментальной vt (r) / r. Мы предполагаем, что эти расхождения происходят из следующих фактов. В эксперименте, взбитая шестерня часто отделяется от опорной плиты так, что их поступательное трение с подложкой сильно ослаблена. Кроме того, взаимодействия зубчатых колес имеют несколько характерных длин, например, расстояние между вершиной и вершиной и расстояние между вершиной и трещиной. Чтобы учесть эти аспекты при моделировании, мы сначала уменьшаем коэффициент поступательного трения γ, а затем используем бинарную смесь вращающихся дисков разных размеров (с соотношением размеров ≃1.3, примерно имитируя несколько длин муфты). Результаты моделирования модифицированной модели показаны на рис. 2 D , что хорошо согласуется с экспериментальными результатами на рис. 2 C и поддерживает наши предположения.
Теоретическое описание качающегося краевого потока.
Чтобы лучше прояснить основной механизм пространственно-осциллирующего коллективного движения, мы используем двумерную (2D) гидродинамическую теорию континуума (12) для описания киральной активной жидкости.Важно отметить, что мы рассматриваем зависящее от положения напряжение трения, вызванное неоднородным распределением роторов, которое существенно для возникновения колебательного краевого потока с точки зрения Oscillating Collective Edge Flow . Гидродинамическими переменными являются массовая плотность спиннеров ϱ (r, t), плотность импульса ϱ (r, t) v (r, t) и плотность углового момента I (r, t) ω (r, t), где I (r, t) — вращающий момент плотности инерции, которые, соответственно, подчиняются законам сохранения массы, импульса и момента количества движения. ⋅ (∇ × v) = ϵij∂ivj — завихренность поля течения, а ηR — вращательная вязкость, возникающая из-за трения между роторами.В уравнении. 4 , последний термин относится к антисимметричному напряжению трения, которое связывает вращение с потоком; член объемной вязкости отсутствует из-за уравнения. 2 , а член нечетной вязкости (30, 31) игнорируется, так как он может поглощаться давлением p и не влияет на касательное напряжение. Сдвиговая и вращательная вязкости зависят от положения из-за неоднородности упаковочной фракции, вызванной ограничением объема. Здесь мы сосредоточимся на неоднородном ηR, являющемся источником колебательного краевого потока.Поскольку ηR возникает в результате фрикционных столкновений между частицами, он пропорционален плотности упаковки прядильщика и частоте столкновений меченого прядильщика с окружающими его частицами. Согласно теории Энскога, частота столкновений может быть приблизительно оценена как 8ρg (σs) kBT / πmσs2 (37), где g (σs) — парная корреляционная функция при контакте. Таким образом, мы имеем ηR = Aρ2g (σs) с неизвестным префактором A. Вириальное расширение дает g (σs) = 1−7ρ / 16 (1 − ρ) 2 − ρ3 / 168 (1 − ρ) 4 (38), так что вращательная вязкость становится ηR (ρ) = Aρ21−7ρ / 16 ( 1 − ρ) 2 − ρ3 / 168 (1 − ρ) 4, [5] что хорошо согласуется с результатами независимого моделирования с префактором A≃2.07 ( SI Приложение ). Уравнение 5 означает, что колебательный профиль локальной фракции упаковки частиц приводит к пространственно-колебательному ηR (рис. 3, , вставка ) и, следовательно, к напряжению трения.
⋅ (∇ × v) = ϵij∂ivj — завихренность поля течения, а ηR — вращательная вязкость, возникающая из-за трения между роторами.В уравнении. 4 , последний термин относится к антисимметричному напряжению трения, которое связывает вращение с потоком; член объемной вязкости отсутствует из-за уравнения. 2 , а член нечетной вязкости (30, 31) игнорируется, так как он может поглощаться давлением p и не влияет на касательное напряжение. Сдвиговая и вращательная вязкости зависят от положения из-за неоднородности упаковочной фракции, вызванной ограничением объема. Здесь мы сосредоточимся на неоднородном ηR, являющемся источником колебательного краевого потока.Поскольку ηR возникает в результате фрикционных столкновений между частицами, он пропорционален плотности упаковки прядильщика и частоте столкновений меченого прядильщика с окружающими его частицами. Согласно теории Энскога, частота столкновений может быть приблизительно оценена как 8ρg (σs) kBT / πmσs2 (37), где g (σs) — парная корреляционная функция при контакте. Таким образом, мы имеем ηR = Aρ2g (σs) с неизвестным префактором A. Вириальное расширение дает g (σs) = 1−7ρ / 16 (1 − ρ) 2 − ρ3 / 168 (1 − ρ) 4 (38), так что вращательная вязкость становится ηR (ρ) = Aρ21−7ρ / 16 ( 1 − ρ) 2 − ρ3 / 168 (1 − ρ) 4, [5] что хорошо согласуется с результатами независимого моделирования с префактором A≃2.07 ( SI Приложение ). Уравнение 5 означает, что колебательный профиль локальной фракции упаковки частиц приводит к пространственно-колебательному ηR (рис. 3, , вставка ) и, следовательно, к напряжению трения.
Сравнение орбитальных угловых скоростей, полученных в результате моделирования (синий квадрат) и континуальной теории с неоднородным ηR (красная сплошная линия). Система такая же, как на рис. 2 B . В теоретических расчетах, зависящий от положения ηR (, вставка ) вводится путем подстановки профиля фракции упаковки из результатов моделирования в уравнение. 5 . Для сравнения мы также наносим на график теоретически рассчитанное vt / r для несжимаемой жидкости роторов (т. Е. Постоянное ηR; черная пунктирная линия), а детали расчета представлены в приложении SI .
5 . Для сравнения мы также наносим на график теоретически рассчитанное vt / r для несжимаемой жидкости роторов (т. Е. Постоянное ηR; черная пунктирная линия), а детали расчета представлены в приложении SI .
Поскольку краевой поток слабый и число Рейнольдса хиральной активной жидкости низкое (центростремительное ускорение ϱv⋅∇v пренебрежимо мало), из формул. 3 и 4 , стационарное уравнение сохранения импульса, таким образом, имеет вид 0 = −∂ip + η∇2vi + ϵij∂j [ηR (2ω − Ω)] — Γvi.[6] Здесь для простоты η рассматривается как постоянная величина, равная ее значению в объеме, η≃25, которое может быть определено из независимого моделирования путем внешнего наложения сдвигового потока в неограниченной активной жидкости ( SI Приложение ).
Сохранение углового момента записывается как I (∂t + v⋅∇) ω = −Γrω − 2ηR (2ω − Ω) + Dω∇2ω + τ, [7] где Γr относится к коэффициенту трения вращения от окружающей среды, Dω коэффициенту диффузии, а τ — полю плотности крутящего момента. Γr и τ соответственно связаны со своими одночастичными аналогами γr и Td соотношением Γr = 4γrρ / πσs2 и τ = 4Tdρ / πσs2.В установившемся режиме v⋅∇ω = 0, и, следовательно, уравнение. 7 уменьшается до 0 = −Γrω − 2ηR (2ω − Ω) + Dω∇2ω + τ. [8] В нынешней фракции упаковки (ρ = 0,6) коэффициент диффузии Dω мал, так что член диффузии в уравнении. 8 можно смело пренебречь. Таким образом, угловая скорость вращения приблизительно равна ω = τ + 2ηRΩΓr + 4ηR. [9] Подставляя уравнение. 9 в формулу. 6 , для тангенциальной составляющей уравнения импульса в полярных координатах имеем β∂r2vt + ∂r (βr) r∂rvt− (β − r∂rβ + r2Γ) r2vt − 2∂rβ ′ = 0, [10 ] где β = η + ΓrηR (Γr + 4ηR) −1 и β ′ = βτ (Γr + 4ηR) −1.Таким образом, краевой поток может быть получен путем решения уравнения. 10 , с граничным условием vt (r = 0) = 0, которое возникает из-за быстрого затухания краевого потока, и граничным условием отсутствия трения на ограниченной боковой стенке, σϕr (R − σs) = ηR∂rvt + vtr −2ω + η∂rvt − vtrr = R − σs = 0. На рис. 3 показана теоретическая орбитальная угловая скорость, которая воспроизводит все особенности колебательного краевого потока, полученные в результате моделирования. Тем не менее, теоретический расчет занижает величину колебаний примерно в два раза, что может быть связано с приближениями, использованными в теоретическом выводе.Кроме того, очевидно, существует фазовый сдвиг между теоретическим расчетом и моделированием, который происходит из следующего факта. Теория континуума не учитывает конечный размер ротора, так что поток жидкости управляется локальным градиентом напряжения трения, в то время как в моделировании поток жидкости создается за счет изменения напряжения трения в масштабе длины ротора. размер ротора. За исключением количественных различий, теоретический расчет хорошо согласуется с результатами моделирования, подтверждая микроскопический механизм колебательного краевого потока, предложенный в Oscillating Collective Edge Flow .С полученным vt, угловая скорость вращения определяется по формуле. 9 , что также хорошо согласуется с результатами моделирования ( SI Приложение ). Дальнейшая проверка теории континуума дается в приложении SI путем исследования более широких пространств параметров.
На рис. 3 показана теоретическая орбитальная угловая скорость, которая воспроизводит все особенности колебательного краевого потока, полученные в результате моделирования. Тем не менее, теоретический расчет занижает величину колебаний примерно в два раза, что может быть связано с приближениями, использованными в теоретическом выводе.Кроме того, очевидно, существует фазовый сдвиг между теоретическим расчетом и моделированием, который происходит из следующего факта. Теория континуума не учитывает конечный размер ротора, так что поток жидкости управляется локальным градиентом напряжения трения, в то время как в моделировании поток жидкости создается за счет изменения напряжения трения в масштабе длины ротора. размер ротора. За исключением количественных различий, теоретический расчет хорошо согласуется с результатами моделирования, подтверждая микроскопический механизм колебательного краевого потока, предложенный в Oscillating Collective Edge Flow .С полученным vt, угловая скорость вращения определяется по формуле. 9 , что также хорошо согласуется с результатами моделирования ( SI Приложение ). Дальнейшая проверка теории континуума дается в приложении SI путем исследования более широких пространств параметров.
Коллективные режимы движения с повышенной плотностью.
Было показано, что неоднородное распределение частиц имеет решающее значение для возникновения осциллирующего краевого потока, что подчеркивает важность сжимаемости хиральной активной системы.Для дальнейшего изучения влияния сжимаемости на коллективное движение мы рассмотрим системы моделирования с широким диапазоном плотности упаковки от ρ = 0,50 до 0,82. Интересно, что при увеличении ρ мы находим три различных режима коллективного движения, как показано на рис. 4 A . При низком значении ρ = 0,6 коллективный поток колеблется около нуля, и его величина спадает до нуля при уменьшении r. Затухание vt (r) / r напоминает круговое течение Куэтта вязкой жидкости, заключенной в два концентрических цилиндра (39), в которых внешний цилиндр вращается с постоянной угловой скоростью, а внутренний цилиндр остается неподвижным. Это означает, что хиральная активная система с низким значением ρ находится в жидкостном режиме. При высоких значениях ρ = 0,8 система вращается как твердое тело с постоянной угловой скоростью без каких-либо периодических колебаний (только с колебаниями). В этом случае система представляет собой упругое твердое тело. При умеренном ρ = 0,7 vt (r) / r колеблется около постоянного ненулевого значения (без затухания), указывая на то, что различные области активной системы могут скользить друг по другу и, в то же время, ограничены упругим фоном. .
Это означает, что хиральная активная система с низким значением ρ находится в жидкостном режиме. При высоких значениях ρ = 0,8 система вращается как твердое тело с постоянной угловой скоростью без каких-либо периодических колебаний (только с колебаниями). В этом случае система представляет собой упругое твердое тело. При умеренном ρ = 0,7 vt (r) / r колеблется около постоянного ненулевого значения (без затухания), указывая на то, что различные области активной системы могут скользить друг по другу и, в то же время, ограничены упругим фоном. .
( A ) Орбитальная угловая скорость различных режимов коллективного движения для ρ = 0.60,0.70,0.80 при моделировании. ( B ) Экспериментальные результаты для низкой и средней фракций упаковки, где vt (r) / r при средней фракции упаковки отображается на правой красной вертикальной оси.
Для сравнения мы также наносим на график орбитальную угловую скорость экспериментальных спиннеров при низкой (ρ = 0,65) и умеренной (ρ = 0,78) фракциях упаковки, как показано на рис. 4 B . Экспериментальные результаты согласуются с моделированием на рис.4 А . Здесь экспериментальная система с высоким ρ, подобная твердому телу, не может быть достигнута из-за зубчатой структуры частиц, поэтому соответствующие результаты не приводятся.
Структурные истоки переходов между различными модами.
Чтобы выяснить структурное происхождение различных режимов коллективного движения, мы измеряем в моделировании параметр ориентационного порядка ψ6j = (∑k∈Nje6iθjk) / Nj (рис. 5 A ), который характеризует локальный кристаллический порядок (40 , 41).Здесь сумма берется по Nj ближайшим соседям частицы j, а θjk — угол между rk − rj и фиксированной произвольной осью. При ρ = 0,60 среднее значение ψ6j мало, и система находится в режиме вязкой жидкости. В этом случае частицы могут легко менять свое положение и не могут выдерживать жесткое вращение (Movie S1). При ρ = 0.80 большая часть областей (кроме приграничной) имеет довольно большие ψ6j, и частицы внутреннего слоя образуют бездефектный кристалл. Таким образом, активные частицы не могут изменить свое относительное положение, допуская только полное вращение (Movie S3).Тем не менее при ρ = 0,70 области высоких значений ψ6j просачиваются и образуют твердый каркас; Между тем, некоторые дефекты с низким ψ6j распределяются случайным образом (Movie S4). Благодаря наличию дефектов активные роторы могут переставлять свое положение на упругом фоне, демонстрируя «вязкоупругое» коллективное движение. Аналогичный структурный анализ экспериментальных систем выполнен в приложении SI .
Таким образом, активные частицы не могут изменить свое относительное положение, допуская только полное вращение (Movie S3).Тем не менее при ρ = 0,70 области высоких значений ψ6j просачиваются и образуют твердый каркас; Между тем, некоторые дефекты с низким ψ6j распределяются случайным образом (Movie S4). Благодаря наличию дефектов активные роторы могут переставлять свое положение на упругом фоне, демонстрируя «вязкоупругое» коллективное движение. Аналогичный структурный анализ экспериментальных систем выполнен в приложении SI .
( A ) Контуры параметра ориентационного порядка ψ6j при малых (ρ = 0.60), средней (ρ = 0,70) и высокой (ρ = 0,80) плотности. ( B ) Контрольная угловая скорость как функция от ρ, где пунктирная линия отмечает точку перехода. ( C ) Первое положительное пиковое значение автокорреляционной функции C (d) как функция от ρ с точкой наискорейшего спуска, отмеченной пунктирной линией. ( D ) Вероятности перколяции для разных пороговых значений (2TSR). ( E ) Среднее количество дефектов, определяемое как ψ6j Теперь исследуем переходы между различными режимами коллективного движения. Для этого проанализируем кривые vt (r) / r для широкого диапазона значений ρ. Контрольное значение [vt (r) / r] 0, то есть среднее значение vt (r) / r в объеме, используется, чтобы отличить вязкоупругую моду ([vt (r) / r] 0> 0) от коллективное движение вязкой жидкости ([vt (r) / r] 0 = 0). Рис. 5 B ясно показывает, что [vt (r) / r] 0 начинает иметь положительное значение при ρ≃0,64, отмечая первую точку перехода. Качество колебаний отличает вязкоупругую моду (колебание) от коллективного вращения упругого твердого тела (колебания).Качество колебаний можно количественно оценить с помощью автокорреляционной функции si (r) ≡vt (r) / r − ⟨vt (r) / r⟩ для каждой кривой, C (d) = ⟨si (r) si (r + d )⟩ / Ν2 (42), где ν — стандартное отклонение si (r), d — отставание по расстоянию, а ⟨⋅⟩ — пространственное среднее. Переходы между различными модами должны возникать в результате структурных изменений кирального активного вещества. Согласно предыдущим обсуждениям, структурные изменения соответствуют перколяции твердоподобных областей или образованию бездефектного кристалла. На рис. 5 D показана зависимость вероятности просачивания от ρ. Здесь предполагается, что перколяция возникает, когда размер x или y соединенной твердотельной области [то есть области с ψ6j≥0,84 (43)] превышает пороговый размер 2TSR, с заданным числом TS; и вероятность перколяции оценивается как средняя частота перколяции на кадр.Ясно, что вероятность перколяции становится отличной от нуля при ρ = 0,64, что количественно согласуется с первой точкой перехода режима движения, представленной на рис. 5 B . (Обратите внимание, что перколяция здесь не обязательно указывает на фазовый переход из жидкости в гексатик, учитывая, что наша система слишком мала, чтобы различить, существует ли дальнодействующая корреляция.) На рис. 5 E показано среднее количество дефектов. , ND, на кадр в объеме как функция ρ. Здесь дефект определяется как область с ψ6j меньше заданного значения TD.Результаты показывают, что дефекты возникают только при ρ≤0,8, что полностью соответствует второй точке перехода режима движения, как определено на фиг. 5 C . Таким образом, мы проясняем микроскопические структурные причины переходов между различными режимами коллективного движения. Различные роторы взаимодействуют посредством отталкивающего типа потенциала Леннарда – Джонса (LJ), U (r) = 4ϵσsr2l − σsrl + ϵ, где r — расстояние между центрами ротора. Поступательная степень свободы активных частиц удовлетворяет уравнению Ланжевена с недостаточным демпфированием (44), mv. = Fr + Fw + η − γv, [11] где m = 1 — масса частицы, γ = 100 — коэффициент поступательного трения. , а Fr и Fw — стерические силы между частицами и стенками частицы соответственно. Здесь стохастическая сила η распределена по Гауссу с η (t) = 0 и η (t) η (t ′) = 2kBTγδ (t − t ′) с температурой kBT = ϵ. Точно так же спин-угловая скорость частиц изменяется согласно Isω. = Td + ξ − γrω, [12] где Is = 18mσs2 относится к моментам инерции ротора, γr = 13σs2γ — коэффициенту трения вращения, Td = 6 — к движущему моменту , а ξ — гауссовский распределенный стохастический момент с нулевым средним и ξ (t) ξ (t ′) = 2kBTγrδ (t − t ′).Кроме того, отскок (44), который вызывает трение между двумя контактирующими роторами (скажем, i и j), может быть реализован путем мгновенного обновления v и ω согласно δvi = δpi / m и δωi = −12rij × δpi / I. Здесь импульс δpi определяется законами сохранения, δpi = −mv∼ij∥ + κ1 + κv∼ij⊥, [13] с параметром κ = 4Is / mσs2, а v∼ij∥ и v∼ij⊥ компоненты относительной скорости в точке столкновения, (vi − vj) −12 (ωi + ωj) × (ri − rj), параллельно и перпендикулярно ri − rj, соответственно. Алгоритм скорости Верле используется для интегрирования уравнений движения с шагом по времени Δt = 10−3 × mσs2 / /. Роторы изначально распределены случайным образом; Выполняется 105 шагов, чтобы устранить влияние начальной конфигурации, и 6,4 × 109 шагов выполняются для вычисления физических величин. Зубчатые роторы помещены в круглую емкость, установленную на электромагнитном встряхивателе. Акриловая крышка размещена на верхней части сосуда может подавить вертикальное движение частиц, и, таким образом, гарантировать, что частицы движутся горизонтально на опорной плите 2D.Вибратор обеспечивает вертикальную вибрацию Z = Asin (2πft), где f — частота вибрации, а A — амплитуда вибрации. Вибрационная сила характеризуется величиной Γ = A (2πf) 2 / g, где g — ускорение свободного падения. Эксперименты проводятся при f = 50 Гц и Γ = 1,7. Система камер высокого разрешения используется для отслеживания траекторий частиц. Гранулированные роторы, использованные в нашем эксперименте, аналогичны роторам в предыдущей работе (45–48). Частицы опираются на выровненные по кругу наклонные ножки (рис.1 B ), которые изготавливаются из полилактида с помощью трехмерного (3D) принтера. Из-за геометрической асимметрии наклонные ножки действуют как упругие пружины и передают колебательную энергию от вибростенда в однонаправленное вращение ротора без активного перемещения. Распределение поступательного смещения одиночного ротора симметрично относительно начала координат, предполагая, что ротор действительно выполняет несмещенное случайное блуждание ( SI Приложение ). Взаимодействия между роторами короткодействующие, отталкивающие.Выступающие зубья зубчатых роторов могут значительно увеличить трение между частицами. Тем не менее ожидается, что дискообразные роторы, изготовленные из материала с большим коэффициентом трения, будут демонстрировать подобное коллективное поведение. Влияние трения между роторами на коллективное движение изучается с помощью моделирования и теории ( SI Приложение ). Все данные, обсуждаемые в статье, доступны в основном тексте SI и приложении . Используя минимальные модели для пассивных и активных роторов с низким числом Рейнольдса в жидкости, мы охарактеризуем гидродинамические взаимодействия между роторами и результирующую динамику пары взаимодействующих роторов. Это позволяет нам лечить в общих рамках пассивные роторы или роторы с внешним управлением, такие как магнитные коллоиды, приводимые в действие вращающимся магнитным полем, и активные роторы или роторы с внутренним приводом, такие как сперматозоиды, ограниченные границами.Известно, что гидродинамическое взаимодействие пассивных роторов содержит азимутальную составляющую ∼1 / r 2 в диполярном порядке, который может привести к недавно изученному «кооперативному самодвижению» пары роторов с противоположной завихренностью. Также известно, хотя и не широко признано, что это взаимодействие равно нулю для активных роторов как следствие баланса крутящего момента. В данной работе мы показываем, что азимутальная составляющая взаимодействия ∼1 / r 4 возникает в активных системах до октуполярного порядка.Это новый результат, который позволяет нам обсудить динамическое поведение пар пассивных и активных взаимодействующих роторов единым образом и показать, что совместное самодвижение, хотя и более слабое, может также происходить для пар активных роторов. У вас есть доступ к этой статье Это исследование сосредоточено на разработке системы активного несущего винта, способной осуществлять первичное управление и снижение вибрации винтокрылых аппаратов.Цель состоит в том, чтобы изучить возможность новой системы приведения в действие откидной кромки (TEF), приводимой в действие пневматическими искусственными мышцами (PAM). Значительные усилия по проектированию привели к созданию серии экспериментальных устройств, на которых тестировались различные аспекты работы самих исполнительных механизмов и приводимых ими систем TEF. Параллельно разрабатывались аналитические модели для прогнозирования квазистатического и динамического поведения этих систем. Первоначальные испытания прототипа секции лопасти со встроенным TEF, управляемым PAM, подтвердили жизнеспособность концепции благодаря успешным лабораторным испытаниям при моделировании M = 0.3 испытания под нагрузкой и в аэродинамической трубе с открытой струей при скоростях до М = 0,13. Этот прототип продемонстрировал способность приводов PAM создавать значительные отклонения закрылков в интересующей полосе частот для первичного управления и снижения вибрации винтокрылого летательного аппарата. Он также выявил важность высокого массового расхода пневматической системы для поддержания производительности при более высоких рабочих частотах. Исследования по разработке и совершенствованию приводов PAM были сосредоточены на новой технологии производства, которая была изобретена для непосредственного устранения недостатков предыдущих разработок. В последние десятилетия более глубокое и детальное понимание динамического поведения вращающегося оборудования облегчило изучение и проектирование нескольких устройств, направленных на снижение трения, гашение вибрации и управление, увеличение скорости вращения и оптимизация механической конструкции. Среди этих устройств многообещающая технология представлена магнитными приводами, используемыми в качестве подшипников, которые нашли широкое распространение в роторной динамике и в высокоточных приложениях.Первая классификация магнитных подшипников в соответствии с физическим принципом работы позволяет выделить два основных семейства: a) Активные магнитные подшипники [1], [2], использующие электронный блок управления для регулирования тока, протекающего в катушках приводы. Им нужен внешний источник энергии. б) Пассивные магнитные подшипники [3], [4], [5]: они не нуждаются в каком-либо электронном оборудовании. Управление механической структурой достигается без использования каких-либо внешних источников энергии. Они используют силу сопротивления или силу Лоренца из-за генерации вихревых токов, возникающих в проводнике при относительном движении в магнитном поле.Для активных магнитных подшипников требуются датчики и электронное оборудование, но, хотя они и более дорогие по сравнению с классическими шарикоподшипниками, они предлагают несколько технологических преимуществ: Отсутствие всех усталостных и трибологических проблем из-за контакта: это позволяет использовать такие подшипники в вакууме системы в чистых и стерильных помещениях или для транспортировки агрессивных или очень чистых сред и при высоких температурах; Смазка не требуется; Отсутствие загрязнения пылью, создаваемой трением между ротором и статором; Низкие потери в подшипниках: при высоких рабочих скоростях в 5-20 раз меньше, чем в обычных шариковых или опорных подшипниках, что снижает эксплуатационные расходы; Вязкого трения можно избежать, если ротор находится в высоком вакууме; Низкий уровень вибрации; Динамика адаптируется к желаемому применению путем настройки контура управления; Точное позиционирование ротора благодаря контуру управления: это в основном определяется качеством сигнала измерения в контуре управления. Достижимое быстрое позиционирование и / или высокая скорость вращения ротора; Малая чувствительность к условиям эксплуатации; Предсказуемость поведения. Можно сделать дальнейшие заявления о технологии реализации: Зазор между ротором и подшипником обычно составляет несколько десятых миллиметра, но для конкретных применений он может достигать 20 мм.В этом случае, конечно, подшипник становится намного больше; Ротор может вращаться с высокой скоростью. Высокая окружная скорость в подшипнике, ограниченная только прочностью материала ротора, открывает возможности для разработки новых машин с более высокой удельной мощностью и реализации новых конструкций. Фактически достижима скорость около 350 м / с, например, при использовании аморфных металлов, которые могут выдерживать высокие напряжения и в то же время имеют очень хорошие магнитомягкие свойства, или путем связывания пластин ротора углеродными волокнами.Конструктивные преимущества обусловлены отсутствием смазочных уплотнений и возможностью увеличения диаметра вала в месте установки подшипника. Это делает вал более жестким и менее чувствительным к вибрациям; Удельная грузоподъемность подшипника зависит от типа ферромагнитного материала и конструкции электромагнита подшипника. Оно будет составлять около 20 Н / см2 и может достигать 40 Н / см2. Контрольная площадь — это площадь поперечного сечения подшипника. Таким образом, максимальная нагрузка на подшипник в основном зависит от размера подшипника; Подшипник и ротор могут быть объединены на одном валу за счет реализации безподшипниковых конфигураций, которые позволяют уменьшить размер системы и обеспечить экономию затрат. Опорные подшипники — это дополнительные шариковые или опорные подшипники, которые при нормальной работе не контактируют с ротором. Компенсация дисбаланса и вращение без усилия — это функции управления, при которых вибрации из-за остаточного дисбаланса измеряются и идентифицируются AMB.Сигнал используется либо для создания противодействующих и компенсирующих сил подшипника, либо для смещения оси ротора таким образом, чтобы ротор вращался без усилий; Диагностика выполняется легко, так как состояния ротора в любом случае измеряются для работы AMB, и эту информацию можно использовать для проверки рабочих условий и производительности. Возможна даже активная диагностика за счет использования AMB в качестве исполнительных механизмов для генерации четко определенных тестовых сигналов одновременно с их функцией подшипника; Более низкие затраты на техническое обслуживание и более длительный срок службы AMB были продемонстрированы в тяжелых условиях.По сути, они связаны с отсутствием механического износа. В настоящее время это основная причина увеличения числа применений в турбомашиностроении; Структура затрат на AMB соответствует структуре затрат на типичный продукт мехатроники. Затраты на разработку прототипа, в основном из-за требовательного программного обеспечения, могут быть довольно высокими. С другой стороны, серийное производство значительно снизит затраты из-за переносимости этого программного обеспечения. Активные магнитные подшипники могут быть классифицированы как типичный мехатронный продукт из-за своей природы, которая включает в себя механические, электрические и управляющие аспекты, объединяющие их в единую систему. В этой главе описывается конструкция, моделирование, экспериментальные испытания и валидация всех подсистем ротора на пятиосном активном магнитном подвесе. Аспекты механических, электрических, электронных и управляющих стратегий объясняются с помощью мехатронного подхода, оценивающего все взаимодействия между ними. Основные цели рукописи: а) проиллюстрировать этапы проектирования и моделирования пятиосного активного магнитного подвеса; б) Обсудить этапы проектирования и практическую реализацию стандартной стратегии управления подвеской; c) Внедрить автономную технику электрического центрирования приводов.Экспериментальный испытательный стенд представляет собой вал (вес: 5,3 кг. Длина: 0,5 м), поддерживаемый двумя радиальными и одним осевым цилиндрическими активными магнитными подшипниками и приводимый в действие асинхронным высокочастотным электродвигателем. Глава начинается с обзора наиболее распространенных технологий. используется для поддержки роторов с глубоким анализом их преимуществ и недостатков по сравнению с активными магнитными подшипниками. Кроме того, ведется обсуждение современного состояния магнитных подвесок, в котором освещаются направления исследований и цели, достигнутые в последние годы.В центральных разделах приводится подробное описание каждой подсистемы вместе с этапами моделирования. Последние разделы главы посвящены разработке стратегий управления и экспериментальным испытаниям. Объясняется автономный метод электрического центрирования исполнительных механизмов, и его преимущества описываются в контексте проектирования управления. Эту стратегию можно резюмировать следующим образом.Зная, что: а) каждая ось срабатывания состоит из двух электромагнитов; б) для каждого электромагнита требуется текущее управление с обратной связью; c) полоса пропускания этого управления зависит от механического воздушного зазора, тогда метод позволяет получить одно и то же значение ширины полосы замкнутого контура управления током обоих электромагнитов на одной оси срабатывания. Такой подход улучшает производительность и придает большую устойчивость управлению. Децентрализованный подход к стратегии управления, допускающий полную подвеску по пяти осям, проиллюстрирован от этапов проектирования до практической реализации на блоке управления.Наконец, на роторе проводятся экспериментальные испытания для проверки управления подвеской и автономного электрического центрирования. Численные и экспериментальные результаты накладываются друг на друга и сравниваются, чтобы доказать эффективность подхода к моделированию. Стенд, использованный для моделирования, проектирования и экспериментальных испытаний, представляет собой электрический шпиндель (изображение показано на рисунке 1), состоящий из вала, поддерживаемого двумя радиальными и одним осевым активными магнитными подшипниками с цилиндрической геометрией и приводится в действие асинхронным электродвигателем высокой частоты.Два механических шарикоподшипника с радиальными и осевыми воздушными зазорами, равными половине левитационных, расположены на концах вала, чтобы гарантировать безопасное касание вала в аномальных рабочих условиях с чрезмерной амплитудой вращения. Ось вращения горизонтальна, а вес имеет направление каждого подшипника. Изображение ротора. Механические и геометрические параметры ротора. В таблице 1 приведены основные параметры ротора. На рисунке 2 показан разрез системы, показывающий расположение датчиков, исполнительных механизмов, двигателя и ротора. , применяемые во вращающихся машинах, можно рассматривать как типичное мехатронное приложение, поскольку оно включает в себя управление механической системой (ротор) с помощью электронного блока управления, который вырабатывает команды для подачи электропитания на драйверы, регулирующие электромеханические приводы . Вид системы в разрезе: 1) выступ, 2) радиальный датчик, 3) радиальная опора AMB, 4) радиальный ламинированный статор AMB, 5) осевой диск AMB, 6) радиальный ламинированный статор AMB, 7) осевой датчик , 8) крышка датчика, 9) крышка втулки, 10) осевой электромагнит AMB, 11) электродвигатель, 12) опора двигателя, 13) фундамент, 14) резьбовое кольцо, 15) крышка датчика. Взаимодействие и основные функции этих подсистем выделены на Рисунке 3.Представленная схема является стандартным представлением системы. Однако каждый блок может иметь разную природу в зависимости от приложения. Краткое описание технологий, обычно используемых для каждой подсистемы, и технологий, используемых в буровой установке, описанной в этой главе, приводится в следующих разделах. Для активных магнитных подшипников можно перечислить два основных семейства архитектуры управления: Децентрализованное управление SISO: действие каждого исполнительного механизма не зависит от других и использует специальный закон управления и информацию датчиков; Централизованное управление MIMO: приводы связаны, а также информация датчиков.Одно управляющее действие посвящено драйверам питания. Несколько стратегий управления были реализованы и протестированы на роторах, оснащенных активными магнитными подшипниками: Регулятор усиления по расписанию [15]; Адаптивное управление [16], [17]; Надежное управление H∞ [18]; Надежное управление скользящим режимом [19]; Устойчивое управление посредством динамической компенсации назначения собственных структур [20]; Оптимальное управление [21]; Управление динамическим программированием [22]; Контроль генетического алгоритма [23]; Управление нечеткой логикой [24]; Управление линеаризацией обратной связи [25]; Управление выдержкой времени [26]; Управление с помощью передаточной функции [27]; Контроль μ-синтеза [28]. Общая архитектура системы. В этой главе стратегия децентрализованного ПИД реализуется на модуле управления, оснащенном цифровым блоком управления на основе DSP / FPGA (EKU2.1). Эта цифровая платформа позволяет быстро реконфигурировать всю систему, включая до 108 (от FPGA) и 46 (от DSP) конфигурируемых цифровых линий ввода / вывода для ввода / вывода, событий, ШИМ, захвата / генерации и пользовательских функций. FPGA имеет специальную операционную систему жесткого реального времени (HRTOS), основанную на беспредметном планировщике (сторона DSP), включающую время ISR или запускаемое событие.EKU2.1 использует протокол связи точка-точка с одним ведущим устройством (DSP) и несколькими ведомыми устройствами (FPGA), основанный на формате Wishbone; системная шина управляет обменом данными между двумя ядрами. Программный код разработан с использованием целевых инструментов Texas Instruments® Code Composer Studio. Электронные схемы каскада усиления мощности для преобразования выходного сигнала контроллера малой мощности во входной сигнал статора высокой мощности выбираются в соответствии с типом применения.В принципе, можно выделить три основных семейства электронных схем: Линейные аналоговые усилители имеют двухтактные транзисторы на выходном каскаде. Они позволяют увеличить ток и интегрировать линейный усилитель с высоким коэффициентом усиления, такой как операционный усилитель мощности. Преимущество линейных усилителей заключается в точном регулировании тока и напряжения, а также в низком уровне шума, и они имеют номинальный ток менее 10 А. Работа при номинальном токе возможна только при эффективном охлаждении с радиаторами.Поэтому размеры усилителя велики, что обуславливает высокую стоимость. Усилители с переключением режимов повышают эффективность. Поскольку потери в силовых устройствах снижаются, радиаторы намного меньше, и, как результат, усилители с переключаемым режимом имеют компактные размеры, что снижает стоимость. Коммутируемый режим работы силовых устройств широко используется в промышленности, например, для инверторов общего назначения в приводах переменного тока и компьютерных блоках питания.Эта категория усилителей доминирует в драйверах с магнитными подшипниками. В гибридных усилителях используются линейные усилители и усилители с переключаемым режимом. При низком токе двухтактные транзисторы работают как линейный усилитель, а при большом токе — в коммутируемом режиме. Чтобы воспользоваться преимуществами гибридного усилителя, очень важно изменить структуру обмотки в магнитных подшипниках. Буровая установка, рассматриваемая в этой главе, оснащена переключающим усилителем с Н-мостом для каждого привода.Силовой каскад состоит из встроенной платы изолированного силового модуля с четырьмя полностью независимыми ножками MOSFET / IGBT, которые поддерживают до 25 ампер при 100 вольт на шине постоянного тока. Кроме того, максимальная частота переключения ШИМ составляет 80 кГц, что делает этот модуль подходящим для высокопроизводительных приложений управления, где важными факторами являются ширина полосы контура управления и пульсации тока. Схема, используемая для питания драйверов питания, показана на рисунке 4. Драйвер питания схема. Стандартное оборудование АМБ для подвешивания роторов реализовано с пятью парами электромагнитов цилиндрической формы для осуществления активного управления пятью степенями свободы.Коническая форма магнитных подшипников, действующих одновременно в осевом и радиальном направлениях, позволяет сэкономить одну пару электромагнитов и, следовательно, уменьшить размер, хотя конструкция подшипника оказывается более сложной, чем стандартное цилиндрическое решение. Геометрия ступени срабатывания. а) Конический профиль. б) Цилиндрический профиль. Геометрия и конфигурация приводов зависят от профиля электромагнитов и от количества приводов на каждую ступень срабатывания. В данной работе рассматривается классическая конфигурация с четырьмя цилиндрическими исполнительными механизмами на каждую ступень срабатывания. Расположение десяти электромагнитов показано на рисунке 6. Основные электрические и геометрические параметры приводов перечислены в таблице 2. Важная часть характеристик магнитного подшипника зависит от характеристик используемых датчиков перемещения. Для измерения положения движущегося ротора необходимо использовать бесконтактные датчики, которые, кроме того, должны иметь возможность измерения на вращающейся поверхности.Следовательно, геометрия ротора, то есть качество его поверхности, и однородность материала на датчике также будут влиять на результаты измерения. Таким образом, плохая поверхность вызовет шумовые помехи, а геометрические ошибки могут вызвать искажения частоты вращения или кратные ей. Кроме того, в зависимости от области применения в системах магнитных подшипников должны измеряться скорости, токи, плотности потока и температуры. При выборе датчиков перемещения, в зависимости от применения магнитного подшипника, необходимо учитывать диапазон измерения, линейность, чувствительность, разрешение и частотный диапазон, а также: Диапазон температур, температурный дрейф нулевая точка и чувствительность; Помехозащищенность от других датчиков, переменных магнитных полей электромагнитов, электромагнитных помех от коммутируемых усилителей; Факторы окружающей среды, такие как пыль, агрессивные среды, вакуум или радиация; Механические факторы, такие как удары и вибрация; Электрические факторы, такие как проблемы с заземлением, связанные с емкостными датчиками. Наиболее важными технологиями датчиков смещения являются: Установка, описанная в этой главе, оснащена пятью вихретоковыми датчиками смещения: высокочастотный переменный ток проходит через воздушную катушку, встроенную в корпус. Секция электромагнитной катушки наводит вихревые токи в проводящем объекте, положение которого необходимо измерить, таким образом поглощая энергию колебательного контура. В зависимости от зазора изменяется индуктивность катушки, и внешняя электронная схема преобразует это изменение в выходной сигнал.Обычные частоты модуляции лежат в диапазоне 1-2 МГц, что дает полезные диапазоны частот измерения от 0 Гц до приблизительно 20 кГц. Динамическое поведение ротора можно описать с помощью различных моделей. В этом разделе описаны методы моделирования и принятые допущения, порядок и выбор действующих сил и перемещений, уравнение движения, используемое для динамического описания, и переменная, используемая для описания моделей. Можно использовать множество методов моделирования; Аналитический жесткий подход (основанный на моделировании ротора 4 d. Вид ротора в разрезе. а) Просмотр с размерами. б) Дискретность для моделирования методом конечных элементов. Основная гипотеза, принятая здесь, заключается в рассмотрении постоянной скорости отжима. В этом случае поведение ротора в плоскости X-Y (известное как изгиб) не связано с поведением в направлении Z (осевым).Другое важное предположение состоит в том, что любое вращение (кроме вращения вращения) должно быть небольшим. Простое описание блок-схемы модели ротора представлено на рисунке 8. Силы (из-за AMB, двигателя и внешних), действующие на ротор, не сгруппированы для поведения XY, а для поведения Z эти сигналы являются подается в блок, описывающий динамическое поведение. Выходы этих блоков — это состояния (перемещения и скорости) систем, передаваемые в виде перемещений и скоростей датчикам, AMB и двигателю.Постоянная скорость вращения Ω используется в модели X-Y для гироскопического поведения и сообщается как выходные данные. Скорость вращения и смещение на датчиках являются физическими объектами, измеряемыми конкретными датчиками, а сигнал передается в блок Sensor; другие смещения и относительные скорости (для AMB и двигателя) должны использоваться для внутренней обратной связи, такой как противоэлектродвижущая сила в двигателе или магнитных подшипниках. Входные данные модели — это силы, действующие на ротор, тогда как выходы обычно представляют собой перемещения либо на датчики, либо на AMB и двигатель (Рисунок 9).Ротор подвешен на двух радиальных магнитных подшипниках (AMB1 и AMB2), которые создают четыре силы, ориентированные как опорную систему отсчета установки и действующие в центре соответствующего AMB; эти силы воздействуют на поведение на плоскости X-Y. Блок-схема модели ротора. Для упрощения описания системы предполагается, что общая внешняя сила действует непосредственно на центр масс ротора; эти три силы ориентированы как опорная система растений. Эти компоненты являются результатом действия любой внешней силы, например силы удара. В то время как поведение X-Y не связано с поведением Z, действующие силы из-за AMB и внешних можно переписать, разделив силы, действующие в плоскости X-Y, от сил, действующих на оси Z.В таблице 3 приведены действующие силы (входные данные) на ротор. Сила срабатывания и положение датчиков. Ссылаясь на рисунок 8, набор выходных сигналов используется для измерений (скорость вращения Ω и смещения на датчике qSENS), а другой набор используется для внутренней обратной связи (смещения и скорости на AMBs qAMB и q˙AMB, а на двигателе qMOT и q˙MOT). В таблице 4 указаны перемещения и скорости (выходы) на роторе. Векторные заказы входов / выходов. Вектор ввода / вывода указан в таблице 5. и должен соответствовать блокам, которые создают такие силы. Чтобы обратиться к методике моделирования (особенно на основе FE), вектор ввода / вывода должен быть переупорядочен, как указано в таблице 5. Динамическое поведение ротора можно описать с помощью уравнений движения (EoM). В следующем разделе описаны уравнения, используемые для модели. Типовые уравнения приводятся для общей модели ротора, а затем применяются к жесткой аналитической модели и модели FE.Хотя скорость вращения постоянна, поведение X-Y не связано с поведением Z точно так же, как можно разделить уравнения. XY Поведение Уравнение движения: Уравнение измерения: Z Поведение Уравнение движения: Уравнение измерения: Названия и описание матриц см. В таблице 6. Название и описание матриц. Стандартный Eom для роторов, описанный ранее, может быть применен к жесткой аналитической модели, основанной на теории 4 d.o.f (для поведения X-Y), с дополнительной d.o.f. для поведения Z. В этой модели уравнения движения составляются в системе координат центра масс, как показано на рисунке 10. d.o.f. модель с обобщенными перемещениями и силами. Физические свойства, используемые в модели: Физические свойства жесткой аналитической модели. XY Behavior Обобщенный вектор перемещений состоит из координат центра масс: Если модель не имеет демпфирования, EoM (4) принимает вид: Уравнение меры имеет ту же структуру, что и в (5). Z Поведение При тех же предположениях уравнение (6) принимает вид: Уравнение меры имеет ту же структуру, что и в (7). Чтобы соответствовать вектору ввода / вывода, описанному в таблице 8, матрицы выбора уравнений (9) и (10) с их уравнением относительной меры должны быть: Матрицы выбора ввода / вывода для жесткой аналитической модели. Здесь описана гибкая модель. Эта модель создается с использованием кода конечных элементов, специально разработанного для вращающихся машин (Dynrot). Выходы этого кода — это матрицы, указанные в уравнениях (4) — (7). В случае использования всех смещений узлов описывается полное динамическое поведение. Вектор смещений q собирает смещения смещения узлов модели в следующем порядке: Обычно используется уменьшенная модель. Типичным методом снижения является модальное (МК) уменьшение, при котором выбираются только некоторые режимы вибрации. Смещения модального преобразования представлены в таблице 10: Обобщенные координаты для полной КЭ модели. Преобразование узлов в модальное. Уравнения движения для сокращенной модели ранее были такими же, как в уравнениях (4) — (7), где узловые смещения заменены модальными смещениями, а матрицы и вектор представлены в их модальных формах. Матрицы выбора входа / выхода должны быть преобразованы, начиная с матриц FEM, как показано в: Преобразование матриц ввода / вывода из узлового в модальное. Динамические уравнения (4) — (7) могут быть представлены с явной скоростью вращения в представлении пространства состояний следующим образом, для поведения XY или Z: Где: Переменные представления пространства состояний. Целью этого раздела является объяснение шагов, выполняемых для выполнения конструкции управления подвеской. Стандартная децентрализованная стратегия управления проиллюстрирована двумя вложенными контурами, внутренним для текущего управления и внешним для положения. Подробное описание этой стратегии сопровождается описанием автономной стратегии электрического центрирования, которая используется для выравнивания электрических параметров электромагнитов на каждой ступени срабатывания и позволяет получить устойчивое и сбалансированное управляющее воздействие. На рисунке 4 показана классическая стратегия управления для одноосного AMB. Система характеризуется вложенной структурой управления, где внутренние контуры описывают контуры тока, используемые для достижения прямого привода усилия (силы) привода, а внешний контур используется для компенсации погрешности положения ротора относительно номинального воздушного зазора. Как правило, для каждой оси применяется одна и та же стратегия; поэтому они управляются независимо друг от друга, а управление называется децентрализованным.Привод одной оси осуществляется двумя отдельными Н-образными мостами. Чтобы оказать положительное воздействие на ротор, ток в верхней катушке увеличивается за счет управляющего тока, в то время как ток в нижней катушке уменьшается за счет управляющего тока, и наоборот для отрицательных сил. Кроме того, чтобы линеаризовать характеристику силы тока к силе электромагнита, к обеим катушкам применяется постоянный ток смещения. Управление положением осуществляется с помощью пяти децентрализованных ПИД-регуляторов. Проектирование и настройка параметров законов управления хорошо описаны в [1] и [2].Здесь представлена передаточная функция диаграммы Боде закона управления положением (Рисунок 11). Схема Боде положения управления. Отклик на дисбаланс. а) Левая ступень срабатывания. б) Правая ступень срабатывания. Экспериментальная характеристика была выполнена с использованием классических инструментов роторно-динамического анализа: отклики на дисбаланс (рис. 12), водопады (рис. 13), орбитальная труба и орбитальный вид (рис. 14, рис. 15). Теоретические заметки по ротодинамическому анализу можно найти в [29]. Активные магнитные подшипники предлагают несколько технологических преимуществ, которые делают их использование обязательным в некоторых конкретных приложениях, как правило, когда требуется чистая окружающая среда или техническое обслуживание является дорогостоящим или трудным в управлении. С другой стороны, основными недостатками являются в основном более высокие, чем у классических шарикоподшипников, затраты из-за внедрения датчиков и электронного оборудования, а также сложность этапов проектирования электрических и электронных подсистем и стратегий управления. Одним из аспектов, в котором эта трудность более очевидна, является центрирование вращающейся части относительно статора и, в частности, датчиков. Датчики действительно предназначены для обнаружения микронных перемещений, и небольшие неточности в измерениях приводят к плохой работе или нестабильности системы в худших случаях. График водопада. а) Х1; б) Y1; в) X2; г) Y2. Разработчик может выбрать геометрическое или электрическое центрирование, в зависимости от приоритетов требований приложения.Первый (рисунок 16.a) состоит в том, что ротор помещается в механический центр, пренебрегая электрическими различиями в параметрах катушек электромагнитов, прежде всего индуктивностью. Последнее (Рисунок 16.b), наоборот, приводит к выравниванию электрических параметров, даже если ротор не вращается вокруг геометрического центра исполнительных механизмов. Орбитальная труба и орбитальный вид на плоскости X1Y1. а) трехмерный вид трубы; б) Проекция на плоскость xy; в) и г) проекция на плоскости Ωx и Ωy. Орбитальная труба и орбитальный вид на плоскости X2Y2. а) трехмерный вид трубы; б) Проекция на плоскость xy; в) и г) проекция на плоскости Ωx и Ωy. В этом разделе раскрывается техника автономного электрического центрирования. Цель состоит в том, чтобы заставить ротор вращаться вокруг точки, которая не обязательно совпадает с геометрическим центром исполнительных механизмов, но обеспечивает симметрию их электрических параметров. Хорошо известно, что значение индуктивности электромагнита зависит от расстояния между ферромагнитной мишенью (в данном случае ротором) и самим электромагнитом. Механическое центрирование (a) и электрическое центрирование (b). Индуктивность в зависимости от положения. Это поведение нелинейно, как показано на рисунке 17, и небольшое изменение положения и, следовательно, индуктивности приводит к значительному изменению электрического полюса привода и динамики управления током, поскольку электрическая динамика электромагнита зависит от значений напряжения питания, сопротивления и индуктивности. (Таблица 2), как в формуле. 17: электрический полюс электромагнита строго зависит от расстояния между целью и приводом, как показано на рисунке 18.Как следствие, эта проблема имеет другое поведение управления током с обратной связью, как показано на Рисунке 19 (a и b). Можно заметить, что одно и то же регулирование тока, применяемое к двум противоположным электромагнитам одной оси срабатывания без электрического центрирования, генерирует два разных отклика в замкнутом контуре. Несколько микрон Airgap создают разницу в сотни герц на текущей полосе пропускания. Учитывая, что такое поведение порождается разность индуктивности стоимости двух электромагнитов, действуя на опорном положении со смещением коррекции внешнего управления положением, ротор может быть установлен на вращение вокруг точки, где происходит выравнивание электрических параметров и Ширина полосы пропускания токовой петли обоих электромагнитов одинакова (Рисунок 19 (c и d)).Дальнейшие исследования и исследования проводятся по этой стратегии, так как этот процесс может выполняться в интерактивном автоматическом режиме с помощью адаптивного метода, способного изменять параметры управления внутреннего токового контура при изменении воздушного зазора, т.е. колеблющиеся. Тенденция электрического полюса при изменении значения индуктивности. В этой главе были описаны этапы моделирования, проектирования и экспериментальных испытаний ротора, оснащенного активными магнитными подшипниками.Описание касается роторно-динамических аспектов, а также подсистемы электрических, электронных и управляющих стратегий. Были раскрыты схема управления стандартной децентрализованной стратегии SISO и детали инновационной техники автономного электрического центрирования. Были представлены экспериментальные результаты, в основном подчеркивающие аспекты роторной динамики и управления. Результаты электрического центрирования. а) диаграмма Боде X-токовой петли до центрирования; б) диаграмма Боде X + токовой петли до центрирования; в, г) X- / X + диаграммы Боде токовой петли после центрирования. Мы проводим обзор теоретических и экспериментальных исследований флокирования за последнее десятилетие: коллективного когерентного движения большого количества самоходных «частиц» (обычно, но не всегда, живые организмы). Подобно равновесным системам конденсированного состояния, стаи имеют различные «фазы», которые можно классифицировать по их симметрии. В самом деле, каждая из фаз, которые теоретически изучены на сегодняшний день, имеют точно такую же симметрию, что и некоторая равновесная фаза (например,г., ферромагнетики, жидкие кристаллы). Эта аналогия с равновесными фазами материи продолжается в том, что все стаи в одной и той же фазе, независимо от их составляющих, обладают одинаковой «гидродинамикой», то есть долгосрочным масштабом и долгосрочным поведением, точно так же, как, например, все равновесные жидкости. описываются уравнениями Навье – Стокса. Тем не менее стаи сильно отличаются от равновесных систем из-за внутренней неравновесности самодвижения составляющих «организмов». Это различие между стадами и системами равновесия наиболее ярко проявляется в способности простейшей фазы стада, в которой все организмы в среднем движутся в одном и том же направлении (мы называем это «ферромагнитным» стадом; мы также используем термины «векторно-упорядоченный» и «полярно-упорядоченный» для этой ситуации) существуют даже в двух измерениях (т.е.е. существа, движущиеся по плоскости), вопреки известной теореме Мермина – Вагнера о равновесной статистической механике, которая утверждает, что непрерывная симметрия (в данном случае инвариантность вращения или способность стаи летать в любом направление) не может быть спонтанно нарушено в двумерной системе только с короткодействующими взаимодействиями. «Нематическая» фаза стай, в которой все существа предпочтительно движутся или просто ориентированы преимущественно вдоль одной и той же оси, но с равной вероятностью движения в любом направлении, также резко отличается от своего равновесного аналога (в данном случае нематика). жидкие кристаллы).В частности, он показывает огромные колебания численности, которые фактически растут вместе с числом организмов быстрее, чем N «закон больших чисел», которому подчиняются практически все другие известные системы. Что касается равновесных систем, то гидродинамическое поведение любой фазы флок кардинально модифицируется дополнительными законами сохранения. Одним из таких законов является сохранение количества движения фоновой жидкости, по которой движутся многие стайки, что приводит к «гидродинамическому обратному потоку», вызванному движением большого стада через жидкость.Мы рассматриваем теоретические работы по влиянию такой фоновой гидродинамики на три фазы флок — ферромагнитную и нематическую фазы, описанные выше, и неупорядоченную фазу, в которой нет порядка в движении организмов. Самое удивительное предсказание в этом случае состоит в том, что «ферромагнитное» движение всегда неустойчиво для подвесок с малым числом Рейнольдса. Эксперименты, похоже, подтвердили эту нестабильность, но ожидается количественное сравнение. В заключение мы предлагаем провести дальнейшую теоретическую и экспериментальную работу. Имея более 1250 наименований деталей, покрывающих 98% европейского автомобильного парка, вы можете положиться на TRW, ведущего производителя на независимом рынке запчастей, чтобы укрепить свой бизнес. Предоставьте своим клиентам превосходное обслуживание с помощью ассортимента тормозных роторов, который предлагает превосходное качество и все более широкий охват, и все это подкреплено более чем 100-летним опытом TRW. Наши тормозные диски дают вам: Покрытие частей ротора специальной черной краской создает уникальную поверхность, которая создает защитный барьер от коррозии. Краска была специально разработана компанией TRW по производству оригинального оборудования и обеспечивает глянцевую поверхность ротора (а для взыскательных автомобилистов она тоже хорошо выглядит). Нам нравится, когда установщики делают отличную работу для клиентов, помогая им быстро приспособиться. Это еще одно преимущество нашей линейки Black Painted. Эти тормозные диски упакованы в бумагу с VCI, которая препятствует проникновению влаги.Это означает, что нам не нужно покрывать диски маслом или антикоррозийным средством, которое необходимо очистить перед установкой. Вы просто достаете их из коробки и приступаете к работе, что экономит время и деньги. Это нововведение основано на последних достижениях, обнаруженных в ходе прямых исследований и разработок, которые TRW поддерживает с крупными производителями автомобилей по всему миру, чтобы наши клиенты могли повысить свою ценность. Высокоуглеродистые роторы помогают удовлетворить постоянно растущие требования к тормозным роторам с точки зрения веса, тормозных характеристик и характеристик NVH (устойчивости к шумовой вибрации). Поскольку все больше производителей автомобилей вводят диски из высокоуглеродистой стали в стандартную комплектацию, мы делаем все возможное, чтобы вы могли рассчитывать на надежное покрытие из нашего ассортимента послепродажного обслуживания. Вот почему: Наши исчерпывающие тесты гарантируют: Затем отливки проходят ряд строгих испытаний и проверок перед отправкой на обработку для обеспечения высочайшего уровня безопасности. Магнитные подшипники сами по себе не являются новой технологией, но контроль и внедрение таких устройств все еще является перспективной наукой. Магнитные подшипники особенно привлекательны для некоторых применений из-за низких потерь энергии, связанных с их работой без трения.Используя электромагнитные силы, ротор можно левитировать без механического контакта между ротором и его опорами.
Одно из основных применений магнитных подшипников — это механические накопители энергии с использованием маховиков, которые потенциально имеют значительно более высокую плотность накопления энергии, чем более стандартные устройства, такие как химические батареи. Маховики, оснащенные магнитными подшипниками, могут использоваться не только для накопления энергии, но также могут обеспечивать срабатывание для управления ориентацией в спутниковых приложениях.В концептуальных конструкциях таких систем маховиков обычно используется диск, состоящий из ступицы (металлической или композитной) и высокопрочного композитного обода, вращающегося при высоких скоростях вращения, 50kRPM или выше. Это вызывает значительные нагрузки на обод и ступицу. Кроме того, по мере добавления или отвода энергии из системы скорость ротора изменяется в широком диапазоне, что приводит к возникновению циклических нагрузок на диск и возможных трещин, вызванных усталостью. Возникновение и рост таких трещин имеет потенциально катастрофические последствия, которые могут привести к разрушению всей конструкции.Соответственно, мониторинг состояния имеет решающее значение для поддержания целостности таких устройств. В этой диссертации описывается и оценивается стратегия мониторинга состояния, основанная на получении и анализе измерений вибрации. Распространенным методом в этом отношении является отслеживание изменений синхронной вибрации из-за дисбаланса. Однако такой подход должен учитывать стратегию контроллера, используемую с магнитными подшипниками. Здесь разработана имитационная модель, которая состоит из системы маховика, поддерживаемой магнитными подшипниками, которые управляются с использованием адаптивной стратегии, подавляющей синхронную вибрацию.Взаимодействие между вибрацией ротора и откликами контроллера оценивается, чтобы получить представление об индикаторах зарождения и роста трещин. Результаты и выводы также подтверждаются с помощью экспериментального испытательного стенда. Представлены и обсуждены некоторые идеи и рекомендации по подходящим стратегиям обнаружения трещин в роторных системах, взаимодействующих с активными контроллерами подшипников. ©2013-2025 «АртЛига». Конкурс в области промышленного дизайна мебели.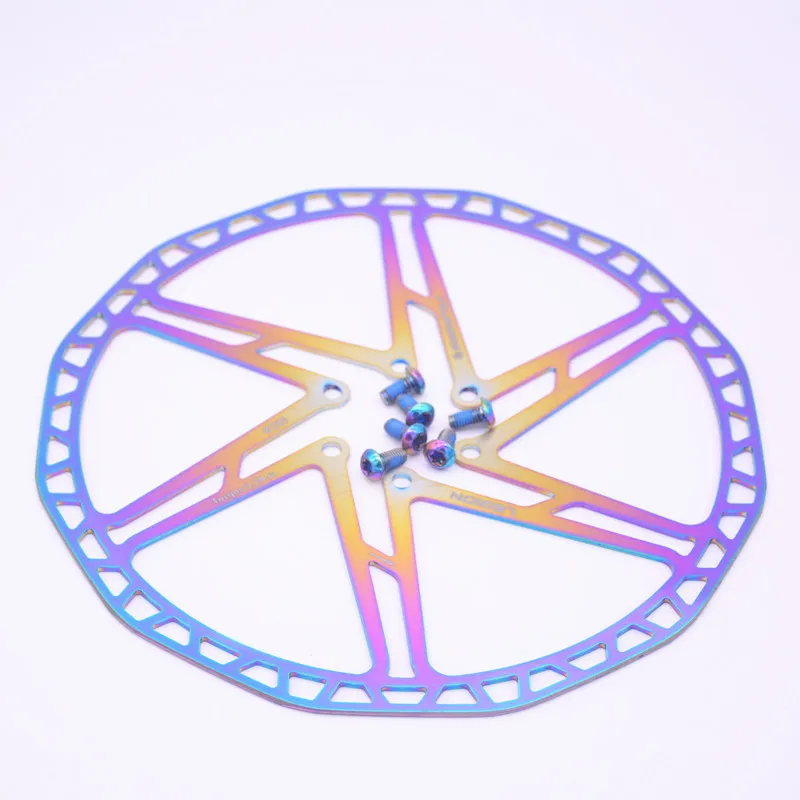 C (d) колеблется при совершенных колебаниях, но быстро исчезает при чистых колебаниях. Первый положительный пик C1 кривой C (d) характеризует качество колебания, которое уменьшается с увеличением ρ (рис. 5 C ). C1 показывает очень крутой спуск около ρ≃0,8, который, таким образом, устанавливает разумную границу между колебаниями и флуктуациями и, следовательно, соответствует второй точке перехода.
C (d) колеблется при совершенных колебаниях, но быстро исчезает при чистых колебаниях. Первый положительный пик C1 кривой C (d) характеризует качество колебания, которое уменьшается с увеличением ρ (рис. 5 C ). C1 показывает очень крутой спуск около ρ≃0,8, который, таким образом, устанавливает разумную границу между колебаниями и флуктуациями и, следовательно, соответствует второй точке перехода. Методы
Моделирование.
 Здесь мы задаем диаметр диска σs = 2, интенсивность взаимодействия ϵ = 1 и потенциальную жесткость l = 12. Помимо радиального потенциального взаимодействия, различные диски также соединяются тангенциально посредством поверхностного трения, реализуемого в результате столкновения с отражением (44). Взаимодействие между граничной стенкой и роторами выбрано как отталкивающий потенциал ЛД с l = 24 и длиной взаимодействия σs без какого-либо трения. При моделировании N = 1000 фиксировано, а коэффициент упаковки регулируется путем изменения R.
Здесь мы задаем диаметр диска σs = 2, интенсивность взаимодействия ϵ = 1 и потенциальную жесткость l = 12. Помимо радиального потенциального взаимодействия, различные диски также соединяются тангенциально посредством поверхностного трения, реализуемого в результате столкновения с отражением (44). Взаимодействие между граничной стенкой и роторами выбрано как отталкивающий потенциал ЛД с l = 24 и длиной взаимодействия σs без какого-либо трения. При моделировании N = 1000 фиксировано, а коэффициент упаковки регулируется путем изменения R.![]() Для измерения орбитальной угловой скорости vt / r и распределения плотности n роторов мы разделим систему на концентрические кольца шириной Δr = 14σs.
Для измерения орбитальной угловой скорости vt / r и распределения плотности n роторов мы разделим систему на концентрические кольца шириной Δr = 14σs. Эксперимент.
Доступность данных.

Кооперативная самоходная установка активных и пассивных роторов
 ..
Что-то пошло не так. Попробуйте еще раз?
..
Что-то пошло не так. Попробуйте еще раз? пневматических искусственных закрылков задней кромки с приводом от мышцы для активных роторов
Аннотация
 Детальный анализ конструкции с помощью конечно-элементной модели (МКЭ) позволил снизить концентрацию напряжений, что привело к увеличению прочности. Испытания на растяжение обжатых приводов показали коэффициент безопасности более 5, а испытания на разрывное давление показали коэффициент безопасности 3. К приводам без сбоев было приложено более 120 000 000 циклов нагрузки. Тестирование характеристик до, во время и после испытаний на усталость не показало снижения производительности PAM. Испытания в аэродинамической трубе полномасштабной лопасти Bell 407, оснащенной системой PAM TEF, показали превосходные возможности управления.При максимальной испытательной скорости в аэродинамической трубе M = 0,3 и пониженном рабочем давлении PAM 28 фунтов на квадратный дюйм отклонения закрылков от половины пика до пика были достигнуты 18,8 ° при 1 / об (7 Гц) и 17,1 ° полупикового значения. Максимальное отклонение закрылков оставалось доступным при 5 об / об (35 Гц). Была разработана модель квазистатической системы, которая объединила силы РАМ, кинематику и аэродинамику закрылков для прогнозирования амплитуд отклонения закрылков. Эта модель хорошо согласуется с экспериментальными данными. Вихревые испытания субпролетной вихревой установки в условиях полномасштабной нагрузки показали способность систем PAM TEF работать при полномасштабных уровнях центробежной (CF), аэродинамической и инерционной нагрузки.Для подачи воздуха во вращающуюся раму использовалось промышленное пневматическое роторное соединение. Экстраполяция результатов на 100% ускорения CF предсказывает 15,4 ° отклонения закрылка от половины пика до пика при 1 / об (7 Гц) и 7,7 ° отклонение закрылка от половины пика до пика при 5 / об ( 35 Гц). Была разработана динамическая модель, которая успешно предсказала поведение исполнительных механизмов PAM и системы PAM TEF во временной области. Эта модель включает динамику регулирующего клапана, потери на трение в трубах, динамику давления, силы PAM, кинематику механизма, аэродинамические шарнирные моменты, жесткость системы, демпфирование и инерцию для расчета динамики вращения закрылка.
Детальный анализ конструкции с помощью конечно-элементной модели (МКЭ) позволил снизить концентрацию напряжений, что привело к увеличению прочности. Испытания на растяжение обжатых приводов показали коэффициент безопасности более 5, а испытания на разрывное давление показали коэффициент безопасности 3. К приводам без сбоев было приложено более 120 000 000 циклов нагрузки. Тестирование характеристик до, во время и после испытаний на усталость не показало снижения производительности PAM. Испытания в аэродинамической трубе полномасштабной лопасти Bell 407, оснащенной системой PAM TEF, показали превосходные возможности управления.При максимальной испытательной скорости в аэродинамической трубе M = 0,3 и пониженном рабочем давлении PAM 28 фунтов на квадратный дюйм отклонения закрылков от половины пика до пика были достигнуты 18,8 ° при 1 / об (7 Гц) и 17,1 ° полупикового значения. Максимальное отклонение закрылков оставалось доступным при 5 об / об (35 Гц). Была разработана модель квазистатической системы, которая объединила силы РАМ, кинематику и аэродинамику закрылков для прогнозирования амплитуд отклонения закрылков. Эта модель хорошо согласуется с экспериментальными данными. Вихревые испытания субпролетной вихревой установки в условиях полномасштабной нагрузки показали способность систем PAM TEF работать при полномасштабных уровнях центробежной (CF), аэродинамической и инерционной нагрузки.Для подачи воздуха во вращающуюся раму использовалось промышленное пневматическое роторное соединение. Экстраполяция результатов на 100% ускорения CF предсказывает 15,4 ° отклонения закрылка от половины пика до пика при 1 / об (7 Гц) и 7,7 ° отклонение закрылка от половины пика до пика при 5 / об ( 35 Гц). Была разработана динамическая модель, которая успешно предсказала поведение исполнительных механизмов PAM и системы PAM TEF во временной области. Эта модель включает динамику регулирующего клапана, потери на трение в трубах, динамику давления, силы PAM, кинематику механизма, аэродинамические шарнирные моменты, жесткость системы, демпфирование и инерцию для расчета динамики вращения закрылка. Разработка системы управления привела к созданию замкнутой системы управления для систем PAM TEF, способной отслеживать сложные, мультисинусоидальные отклонения закрылков, представляющие комбинированную схему срабатывания закрылков первичного управления и уменьшения вибрации. Это исследование показывает перспективность приводов PAM в качестве приводов закрылков задней кромки на активных винтах вертолетов. Надежность, простота интеграции, возможности управления и точность отслеживания этих приводов были подтверждены, что послужило стимулом для дальнейших исследований.
Разработка системы управления привела к созданию замкнутой системы управления для систем PAM TEF, способной отслеживать сложные, мультисинусоидальные отклонения закрылков, представляющие комбинированную схему срабатывания закрылков первичного управления и уменьшения вибрации. Это исследование показывает перспективность приводов PAM в качестве приводов закрылков задней кромки на активных винтах вертолетов. Надежность, простота интеграции, возможности управления и точность отслеживания этих приводов были подтверждены, что послужило стимулом для дальнейших исследований. на активных магнитных подшипниках: методы моделирования и управления
1. Введение
 Например, обычные индуктивные датчики имеют разрешение измерения около 1 ÷ 1000 мкм на миллиметр;
Например, обычные индуктивные датчики имеют разрешение измерения около 1 ÷ 1000 мкм на миллиметр; В случае перегрузки или неисправности AMB они должны работать в течение очень короткого времени: они не позволяют вращающемуся ротору касаться корпуса до тех пор, пока ротор не остановится или пока AMB не восстановит контроль над ротором. Конструкция таких фиксирующих подшипников зависит от конкретного применения и, несмотря на множество хороших решений, по-прежнему требует особого внимания;
В случае перегрузки или неисправности AMB они должны работать в течение очень короткого времени: они не позволяют вращающемуся ротору касаться корпуса до тех пор, пока ротор не остановится или пока AMB не восстановит контроль над ротором. Конструкция таких фиксирующих подшипников зависит от конкретного применения и, несмотря на множество хороших решений, по-прежнему требует особого внимания; Роторно-динамическое поле предлагает несколько примеров областей применения [1], [6]: (a) турбомашинное оборудование, (b) виброизоляция, (c) станки и электрические приводы, (d) маховики с накоплением энергии, (e) приборы в космосе и физика, (f) Бесконтактные суспензии для микротехники, (g) Идентификационное и испытательное оборудование в роторной динамике, (f) Микроприложения, такие как гироскопические датчики [7], [8]. Привлекательный потенциал активных магнитных подвесок мотивировал значительный В последнее десятилетие исследовательские усилия были сосредоточены в основном на электрических подсистемах срабатывания и стратегиях управления [3], [9], [10], [11], [12], [13], [14].
Роторно-динамическое поле предлагает несколько примеров областей применения [1], [6]: (a) турбомашинное оборудование, (b) виброизоляция, (c) станки и электрические приводы, (d) маховики с накоплением энергии, (e) приборы в космосе и физика, (f) Бесконтактные суспензии для микротехники, (g) Идентификационное и испытательное оборудование в роторной динамике, (f) Микроприложения, такие как гироскопические датчики [7], [8]. Привлекательный потенциал активных магнитных подвесок мотивировал значительный В последнее десятилетие исследовательские усилия были сосредоточены в основном на электрических подсистемах срабатывания и стратегиях управления [3], [9], [10], [11], [12], [13], [14].![]() В частности, ротор моделируется кодом FE, а приводы рассматриваются в линеаризованной модели.
В частности, ротор моделируется кодом FE, а приводы рассматриваются в линеаризованной модели. 2. Архитектура системы

Рисунок 1.
Параметр Символ Значение Единица Масса ротора м 5.31 кг Поперечная инерция ротора Jx = Jy 1,153 ∙ 10-1 кг / м2 Полярная инерция ротора Jz 10-36 18357 1,826 ∙ м2 Подшипник рад. ![]() 1 место
1 место a 214,5 мм A / V Подшипник рад. 2 место b 212,6 мм A / V Осевой / радиальный воздушный зазор g 0.75e-3 мм Изотропная жесткость опоры f / x 2,5 ∙ 10-5 Н / м Таблица 1.
 Информация для выполнения архитектуры управления с обратной связью предоставляется датчиками перемещения и тока.
Информация для выполнения архитектуры управления с обратной связью предоставляется датчиками перемещения и тока. Рисунок 2.
2.1. Управление

Рисунок 3.
2.2. Драйверы питания
 КПД низкий из-за высоких потерь в двухтактном транзисторе.
КПД низкий из-за высоких потерь в двухтактном транзисторе. Рисунок 4.
 Такая геометрия позволяет достичь более высокой скорости вращения, ограниченной в цилиндрическом решении из-за деформаций, растущих в диске осевого подшипника.
Такая геометрия позволяет достичь более высокой скорости вращения, ограниченной в цилиндрическом решении из-за деформаций, растущих в диске осевого подшипника. Рисунок 5.
2.3. Приводы
Параметр Символ Значение Агрегат Вакуумная проницаемость μ0 1.26e-006 В / м Электропитание В постоянного тока 50 В ОСЕВОЙ привод Число оборотов NAX длина lAX 48e-3 м Активная секция на воздушном зазоре SAX 1210e-6 м 2 Номинальный воздушный зазор 75e-3 м Сопротивление RAX 0,5 Ом Номинальная индуктивность L0AX 0,0146 H 9035 9038 9038 9038 9038 9038 9038 NRAD 110 — Длина контура lRAD 135.  2e-3
2e-3 м Активная секция на воздушном зазоре SRAD 24e-6 Номинальный воздушный зазор g0RAD 0.75e-3 M Сопротивление RRAD 0,5 Ω Номинальная индуктивность L0RAD 0,0049 2.4. Датчики

3. Моделирование
 o.f.) здесь представлен рядом с наиболее распространенным методом конечных элементов (FE). Дискретизация программного обеспечения FEM представлена на рисунке 7.b.
o.f.) здесь представлен рядом с наиболее распространенным методом конечных элементов (FE). Дискретизация программного обеспечения FEM представлена на рисунке 7.b. Рис. 7.
3.1. Блок-схема модели
3.1.1. Входы / выходы модели
 Дополнительный магнитный подшипник (AMB3) используется для ограничения перемещений по оси Z (осевой). Пять сил, вызванных AMB, собраны в векторе fAMB. Электродвигатель, используемый для создания крутящего момента (не включен в модель такого типа, в которой скорость вращения считается постоянной), также может воздействовать на две силы в радиальном направлении, но не способен создавать силу в направлении Z .В соответствии с этим вектор fMOT состоит из двух компонентов, действующих в центре двигателя.
Дополнительный магнитный подшипник (AMB3) используется для ограничения перемещений по оси Z (осевой). Пять сил, вызванных AMB, собраны в векторе fAMB. Электродвигатель, используемый для создания крутящего момента (не включен в модель такого типа, в которой скорость вращения считается постоянной), также может воздействовать на две силы в радиальном направлении, но не способен создавать силу в направлении Z .В соответствии с этим вектор fMOT состоит из двух компонентов, действующих в центре двигателя. Рисунок 8.
Рисунок 9.
AMB Электродвигатель Внешний fAMB = {FA1XFA1YFA2XFA2YFA3Z} = {fEXX735YFA3Z} = {fEXX7MOTTY =  5″ border-bottom=»1″ valign=»center»>FEXT =
5″ border-bottom=»1″ valign=»center»>FEXT =FEXTX = FEXTX = FEXTX = 908FEXTX = 908XTX = 908XXTX = 908XFXTX = 908XXTX {fEXTxyFEXTz} (1) Датчики АМВ Мотор qSENS = {xSENS1ySENS1xSExlinkySExlinkzSENS3} = {qSENSxyzSENS3} qAMB = {xAMB1yAMB1xAMB2yAMB2zAMB3} = {qAMBxyzAMB3} qMOT = {xMOTyMOTzMOT} (2) Вход Выход Поведение XY 9007 Z Поведение FXY = {FA1XFEXTxFMXFA2XFA1YFEXTxFMYFA2Y} FZ = {FA3ZFEXTz} = {уху xSENS1xAMB1xMOTxAMB2xSExlinkySENS1yAMB1yMOTyAMB2ySExlink} уг = {zSENS3zΑΜΒ3} (3) Таблица 5.
Название Описание Ом Скорость отжима q (т) Матрица Обобщенные смещения L Матрица демпфирования (симметричная) G Гироскопическая (кососимметричная) матрица KΩ0 Матрица жесткости (симметричная): не зависит от скорости отжима H Циркуляционная (кососимметричная) матрица fs Статические силы R Матрица вращения Силы дисбаланса f (t) Внешние силы Si Матрица выбора входа y (t) Выходные смещения So Матрица выбора выхода Φ Выбранный собственный вектор для модального (MK) редукции Таблица.
3.2. 4dof model
Рисунок 10.
Название Описание м Масса ротора [кг] Jt Поперечный момент относительно любой оси в плоскости вращения [кгм2] Jp Поперечный момент инерции относительно любой оси в плоскости вращения [кгм2] gx, gy Сила тяжести в направлениях x и y [м / с2 ] εx, εy Эксцентриситет статического дисбаланса в направлениях x и y [м] χ Дисбаланс крутящего момента: угловая погрешность [рад] bA1 расстояние от центра масс AMB м] bA2 AMB2 расстояние от центра масс [м] bM Расстояние от двигателя до центра масс [м] bS1 Расстояние датчика 1 от центра масс [м] bS2 Расстояние датчика 2 от центра масс [м] Таблица 7.
XY Behavior Z Behavior Sixy = [11110000000011110000bA10 − bM − bA2 − bA10bMbA20000] 4×8 Siz = [11] 1×2 (11) 2000So, Soxy ‘= [Soxy’], Soxy8 = [Soxy ‘ [100 − bS1100 − bA1100bM100bA2100bS201bS1001bA1001 − bM001 − bA2001 − bS20] Soz = [10100101] 4×2 Таблица 8.
3.3. Модель гибкого ротора (FE)
3.3.1. Полная модель
3.3.1. Уменьшенная модель
XY Behavior Z Behavior qxy (t) = {x1x2 … xny1 } qz (t) = {z1z2 … zn} (12) Таблица 9.
Поведение XY Поведение Z ξxy (t) = Φxyqxy (t) ξz (t) = Φ370 13357 903 Таблица 10.
XY Behavior Z Behavior Sξixzy = Φ (14) Sξoxy = SoxyΦxy Sξoz = SozΦz Таблица 11.
3.4. Представление в пространстве состояний уравнений вращательной динамики
Имя XY Поведение Z Поведение x (t) {qxy (t) q˙xy (t)} {qz (t) q˙z (t)} ( 16) AΩ0 [0I − Mxy − 1KΩ0xy − Mxy − 1Lxy] [0I − Mz − 1KΩ0z − Mz − 1Lz] AΩ1 [00Gxy − Mxy ] [0] AΩ2 [00 − Mxy − 1KΩ2xy0] [00 − Mz − 1KΩ2z0] B [0I0I0Sixy4] u 9097 т) {fsxyfumbfxy} {fszfz} 903 57 y (t) {yxy (t) y˙xy (t)} {yz (t) y˙z (t)} C Soxy Soz D [0] [0] Таблица 12.
4. Схема управления и результаты
4.1. Управление активной магнитной подвеской
Рис. 11.
Рисунок 12.
4.2. Off-lineElectricalCentering
Рис. 13.
Рис. 14.
Рис. 15.
Рис. 16.
Рисунок 17.
Рисунок 18.
5. Выводы
Рисунок 19.
(PDF) Совместное самодвижение активных и пассивных роторов
Тормозные диски и тормозные колодки TRW Aftermarket для безопасности
12 миллионов причин доверять тормозным дискам TRW
TRW ежегодно производит более 12 миллионов тормозных дисков как для оригинального оборудования, так и для независимого вторичного рынка по всему миру, поэтому вы можете доверять лидерам рынка.А поскольку мы всегда находимся в авангарде инноваций, вы получите самые последние разработки в технологии тормозных роторов, которые обеспечат более качественное обслуживание большего числа клиентов. Окрашенные в черный цвет тормозные диски
Оригинальное оборудование TRW никогда не является копией существующей модели — оно спроектировано и построено с нуля для решения реальных задач, с которыми ваши клиенты сталкиваются каждый день. Чтобы обеспечить повышенную коррозионную стойкость и производительность, наше подразделение разработки продуктов создало первые в отрасли тормозные диски, окрашенные в черный цвет. Высокоуглеродистые роторы
Поскольку они разработаны не только в соответствии со стандартами, но и являются лучшим реальным решением, наши высокоуглеродистые роторы могут превосходить спецификации производителя.Они обеспечивают улучшенные термические характеристики, отличную стабильность и лучшую производительность. Увеличьте свой бизнес за счет более быстрой установки тормозного ротора
Существует широкий ассортимент роторов TRW, которые поставляются с установочными винтами, поэтому старые, изношенные и корродированные крепления никогда не придется повторно использовать.Крепежные винты часто повреждаются при замене тормозного ротора и не могут быть использованы повторно. Включив в наши тормозные диски крепежные винты, мы сделали замену тормозных дисков проще, быстрее и безопаснее, чем когда-либо. Для большинства наших продуктов вы получите все необходимое в одной коробке TRW. Это означает, что вы можете предоставлять один и тот же отличный сервис каждый раз, а ваш клиент всегда может рассчитывать на лучшую производительность. Более жесткие допуски на тормозные диски
При разработке нашего оригинального оборудования мы контролируем каждую деталь каждой детали и не идем на компромисс в отношении сырья или допусков на обработку.Все наши отливки изготавливаются из высококачественного материала GG20 или GG15HC для арбона H, и C, . И мы строго контролируем три других допуска на обработку: DTV (изменение толщины диска) никогда не превышает 12 мкм; биение никогда не превышает 30 мкм; а центральное отверстие закреплено на норме H8. Это означает легкую установку и удобную работу без сюрпризов. Дисковые тормоза с безопасным чугунным покрытием
Поскольку мы стремимся производить самые безопасные и высококачественные тормозные диски, для производства лучшего серого чугуна используется тщательно контролируемая смесь сырья.Качества процесса обработки недостаточно — это должна быть наилучшая смесь из начального литья для достижения наилучшего конечного качества работы. Повышенная безопасность с подшипниками и кольцом датчика ABS.
Мы также предлагаем ряд тормозных роторов со встроенными подшипниками, кольцами датчика ABS и крепежными принадлежностями. Это значительно упрощает жизнь, когда дело доходит до установки, поскольку эти важные компоненты безопасности часто повреждаются при замене ротора. Использование старого, изношенного или поврежденного подшипника также может увеличить риск повреждения самого ротора. Тормозные роторы TRW с установленными колесными подшипниками собраны так, чтобы обеспечить правильную запрессовку подшипника.В зависимости от требований мы поставляем как зубчатые, так и магнитные кольца датчиков ABS. Всесторонняя безопасность тормозных колодок и роторов TRW
Поскольку мы производим не только роторы и тормозные колодки, но и все типы решений для обеспечения безопасности транспортных средств, никто лучше нас не знает, как компоненты работают вместе, чтобы максимизировать мощность тормозной системы и защитить пассажиров внутри автомобиля. Мы проектируем и производим наши роторы, чтобы они были сбалансированной частью тормозной системы.Вот почему тормозные диски и колодки TRW означают наиболее эффективную посадку для вас, лучшее качество для вашего клиента и наилучшие результаты для вашего бизнеса. Мониторинг состояния роторов маховиков, поддерживаемых активными магнитными подшипниками
Аннотация